⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2024-12-16 更新
LineGS : 3D Line Segment Representation on 3D Gaussian Splatting
Authors:Chenggang Yang, Yuang Shi
Abstract representations of 3D scenes play a crucial role in computer vision, enabling a wide range of applications such as mapping, localization, surface reconstruction, and even advanced tasks like SLAM and rendering. Among these representations, line segments are widely used because of their ability to succinctly capture the structural features of a scene. However, existing 3D reconstruction methods often face significant challenges. Methods relying on 2D projections suffer from instability caused by errors in multi-view matching and occlusions, while direct 3D approaches are hampered by noise and sparsity in 3D point cloud data. This paper introduces LineGS, a novel method that combines geometry-guided 3D line reconstruction with a 3D Gaussian splatting model to address these challenges and improve representation ability. The method leverages the high-density Gaussian point distributions along the edge of the scene to refine and optimize initial line segments generated from traditional geometric approaches. By aligning these segments with the underlying geometric features of the scene, LineGS achieves a more precise and reliable representation of 3D structures. The results show significant improvements in both geometric accuracy and model compactness compared to baseline methods.
摘要:三维场景抽象表示在计算机视觉中扮演着至关重要的角色,可实现多种应用,如地图绘制、定位、表面重建,甚至更高级的任务,如SLAM和渲染。在这些表示中,线段因其能够简洁地捕捉场景的结构特征而得到广泛应用。然而,现有的三维重建方法常常面临重大挑战。依赖二维投影的方法受到多视角匹配和遮挡错误引起的不稳定性的影响,而直接的三维方法则受到三维点云数据中的噪声和稀疏性的限制。本文介绍了一种名为LineGS的新方法,该方法结合几何引导的的三维线段重建和三维高斯平铺模型来解决这些挑战,提高表示能力。该方法利用场景边缘的高密度高斯点分布来精化和优化从传统几何方法生成的初始线段。通过将这些线段与场景的基本几何特征对齐,LineGS实现了对三维结构更为精确和可靠的表现。与基线方法相比,结果显示在几何精度和模型紧凑性方面都有显著提高。
论文及项目相关链接
Summary
本文介绍了一种名为LineGS的新方法,该方法结合了几何引导的3D线重建和3D高斯展布模型,旨在解决现有3D重建方法面临的挑战,如多视角匹配的误差和遮挡导致的稳定性问题,以及3D点云数据的噪声和稀疏性问题。该方法通过利用场景边缘的高密度高斯点分布来优化和改进由传统几何方法生成的初始线段,实现了更精确和可靠的3D结构表示。
Key Takeaways
- LineGS方法结合了几何引导和3D高斯展布模型进行3D线重建。
- 现有3D重建方法面临多视角匹配误差、遮挡、点云数据噪声和稀疏性等问题。
- LineGS利用场景边缘的高密度高斯点分布进行优化和改进初始线段。
- LineGS实现了更精确和可靠的3D结构表示。
- LineGS在几何准确性和模型紧凑性方面相比基准方法有明显改进。
- LineGS方法对于复杂场景的结构特征捕捉具有潜在优势。
点击展开 Cool Papers 详细信息
Q: 这篇论文试图解决什么问题?
A: 这篇论文试图解决的主要问题是3D场景中线条结构的精确表示。具体来说,论文中提到现有的3D重建方法在处理线条结构时面临几个挑战:
- 基于2D投影的方法:这些方法依赖于多视图匹配和遮挡处理,但往往因为匹配误差和遮挡问题导致结果不稳定。
- 直接3D方法:这些方法直接从3D点云数据中提取线条信息,但受限于点云数据的噪声和稀疏性,使得提取过程变得困难。
为了克服这些问题,论文提出了一种名为LineGS的新方法,它结合了几何引导的3D线重建和3D高斯绘制模型,以提高3D结构的表示能力。通过利用沿场景边缘的高密度高斯点分布来优化和调整从传统几何方法生成的初始线段,LineGS能够更精确、可靠地表示3D结构。
Q: 有哪些相关研究?
A: 论文中提到了多个与3D线重建相关的研究工作,以下是一些主要的相关研究:
基于结构从运动(SfM)的线检测和匹配方法:
- Bartoli et al. [1], [29] 提出了完整的SfM流程,将线段检测与匹配机制结合起来。
- Schindler [30] 引入了曼哈顿世界假设,为结构化环境增加了几何约束。
基于三角测量的3D线重建方法:
- Hofer et al. [20], [35], [36] 引入了弱极线约束来优化线匹配,并将其集成到Line3D++框架中。
基于深度的线重建方法:
- Zhang et al. [37] 和其他研究者 [38]–[40] 展示了从深度图中直接检测和投影线的深度驱动技术。
直接在3D点云上操作的方法:
- 这些方法通常从点云中分类边缘点开始,聚类属于同一边缘的点,并拟合这些聚类的线条参数。
- 一些工作 [24], [26], [41], [42] 引入了点过滤、加权损失函数和鲁棒边缘参数估计,提高了线分类的准确性和鲁棒性。
基于端到端学习框架的方法:
- 这些方法直接从图像中预测3D线结构,绕过了显式匹配的需要。
- Chelani et al. [47] 使用2D边缘图构建高斯模型,然后聚类这些点到参数化边缘。
这些研究提供了3D线重建的不同视角和方法,包括基于图像的线检测、基于深度的线重建、直接在3D点云上操作的方法,以及基于学习的方法。每类方法都有其独特的优势和局限性,而本文提出的LineGS方法旨在结合几何方法和高斯点的优势,以提高3D线重建的准确性和鲁棒性。
Q: 论文如何解决这个问题?
A: 论文提出了一个名为LineGS的方法来解决3D线段表示的问题,主要通过以下步骤实现:
1. 结合几何引导的3D线重建和3D高斯绘制模型
LineGS方法将几何引导的3D线重建与3D高斯绘制模型结合起来。这种方法首先利用几何方法生成初始的3D线段,然后使用3D高斯点分布来优化这些线段。
2. 高斯点分布的利用
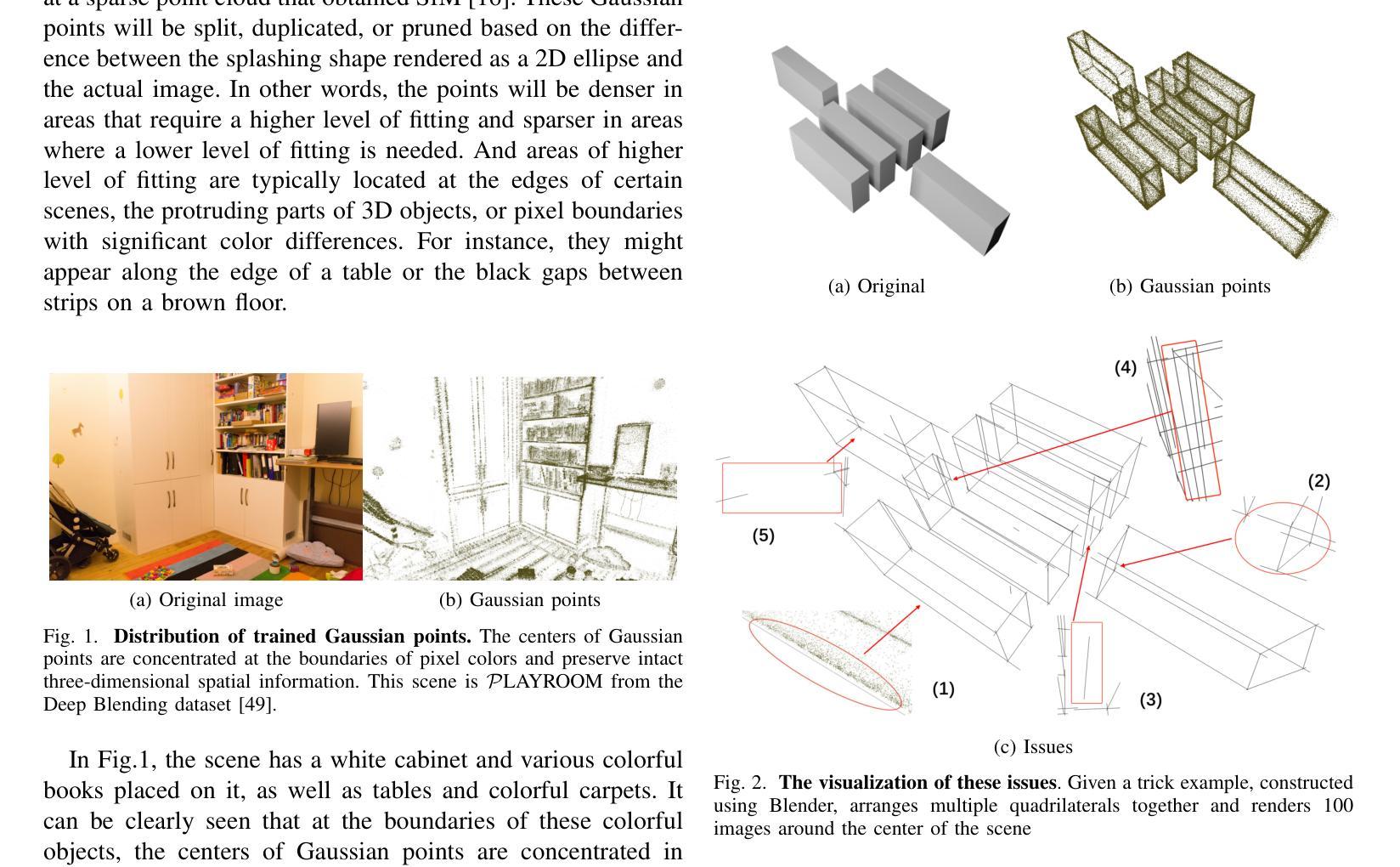
- 高密度高斯点:LineGS利用沿场景边缘的高密度高斯点分布来优化和调整初始线段。
- 对齐线段:通过将线段与高斯点的底层几何特征对齐,LineGS实现了对3D结构更精确和可靠的表示。
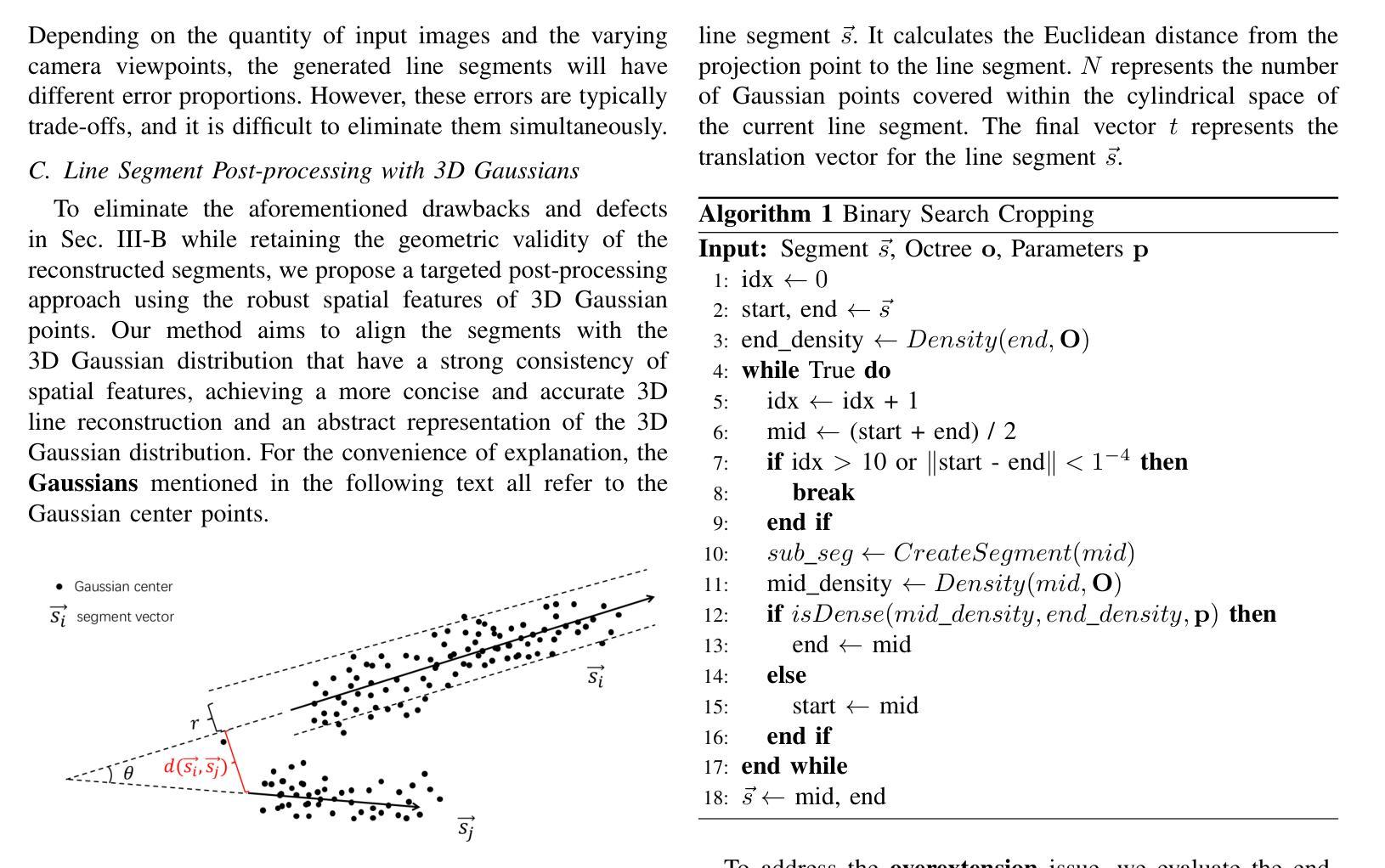
3. 线段后处理
- 位置偏移:使用高斯点进行线性回归,以校正线段的位置偏差。
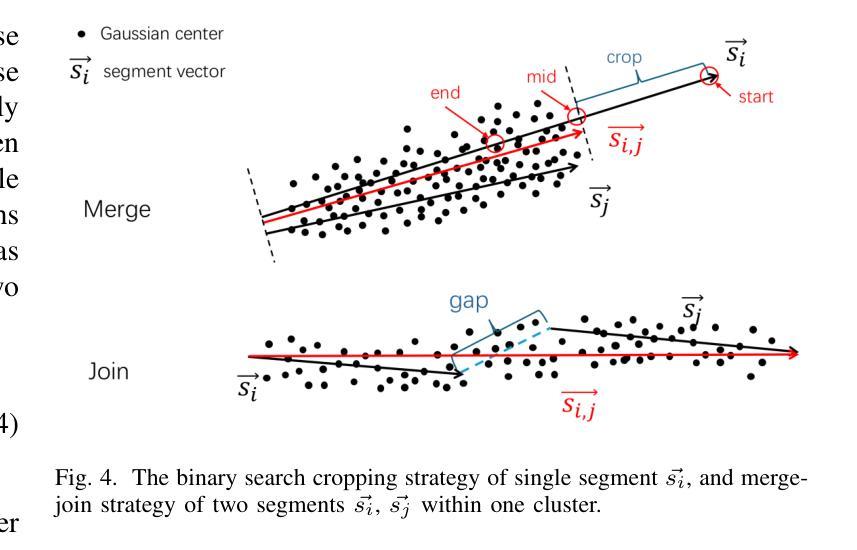
- 过延伸问题:通过评估线段端点和裁剪扩展部分来解决过延伸问题。
- 离群点:设置全局密度阈值,移除密度低于阈值的线段。
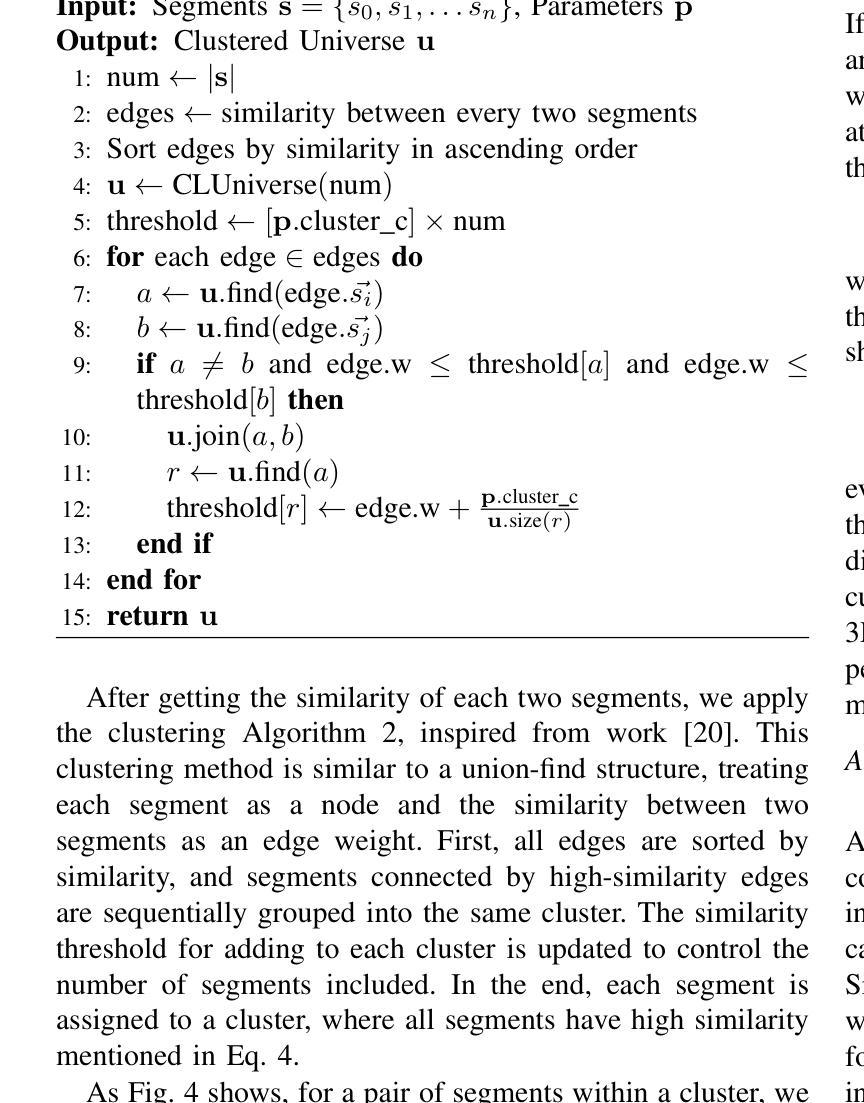
- 重复和不连续问题:通过计算线段间的相似性矩阵并进行聚类,处理重复和不连续问题。
4. 精确的3D线表示
- 结合初始线段和训练好的高斯点:LineGS结合了现有重建方法得到的初始线段和训练好的3D高斯点,以获得更精确的3D线表示。
5. 评估抽象表示能力
- 自定义评估方法:提出了一种自定义的评估方法,通过量化评估3D线段是否有效地表示了场景的空间和颜色特征,以及3D高斯模型中心的分布。
通过这些步骤,LineGS方法不仅提高了几何精度和模型紧凑性,而且还通过评估验证了其方法的有效性。这种方法的提出,有效地解决了现有3D重建方法中的一些关键挑战,如噪声、稀疏性和遮挡问题,从而提高了3D线段表示的准确性和可靠性。
Q: 论文做了哪些实验?
A: 论文中进行了一系列的实验来评估和验证所提出的LineGS方法的有效性。以下是实验的主要内容:
数据集
- ABC-NEF:一个包含100多个CAD模型的子集,用于简单场景和模型的测试,提供了相机校准参数和为NeRF格式化的图像。
- 室内和室外场景:使用了来自原始高斯模型工作的数据集,包括室内场景Playroom、Drjohnson、Room、Counter,以及室外场景Train、Truck和Herz-Jesu25。
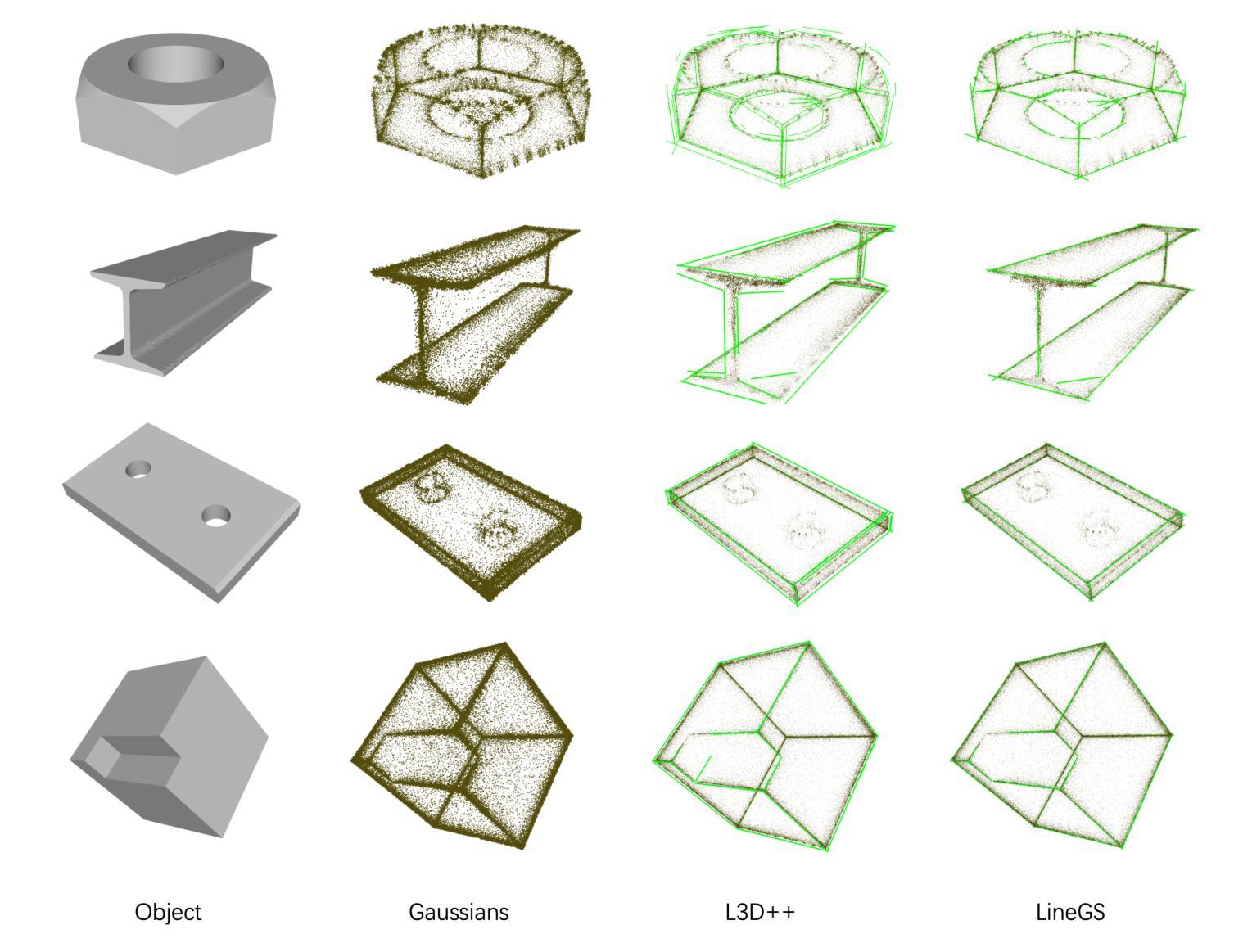
基线方法
- 使用了L3D++ [20]和ELSR [22]这两种几何引导的3D线段重建方法作为基线,它们能够直接从SfM和图像中高效地重建3D线段。
评估指标
- Erms:表示线段附近高斯中心的平均误差。
- Rcovered:表示线段覆盖的高斯中心的百分比。
- RL:表示线段长度与其覆盖的高斯中心数量的比率。
- Score:一个综合评分,结合了上述指标,用于衡量线段对高斯中心分布的表示能力。
实施细节
- 使用了高斯中心作为稀疏点云的输入,以便于3D线重建方法的使用。
- 根据线段的圆柱空间半径调整了权重参数λ。
结果
- ABC-NEF数据集:在115个模型上,LineGS方法使Erms总体下降了10.8%,而Gaussians拟合得分提高了21.2%。
- 室内/室外场景:LineGS方法在真实世界的室内和室外场景中也显示出了显著的改进,得分提高范围从7%到43%。
- Herz-Jesu-25场景:对于L3D++和ELSR两种方法,LineGS方法均显示出改进,分别提高了18.6%和14.2%。
可视化和定量结果
- 论文提供了多种可视化结果,展示了LineGS方法在处理不同场景时的效果,包括ABC-NEF数据集和Tanks&Temples数据集中的Truck场景。
- 论文还提供了定量结果,包括不同半径下圆柱空间的评估结果,以及不同方法在Herz-Jesu-25场景下的表现。
这些实验结果表明,LineGS方法能够有效地优化初始线段,提高对高斯中心分布的拟合度,从而提供了一个有意义的高斯模型的抽象和表示。
Q: 有什么可以进一步探索的点?
A: 论文提出的方法虽然在实验中显示了有效性,但仍有一些可以进一步探索的点:
更先进的线重建方法:论文中提到,LineGS方法的改进可能受到更先进的线重建方法的影响。因此,探索与最新和更精确的线重建算法的集成可能是一个有价值的方向。
高斯模型的非空间特征:论文建议将高斯模型的独特非空间特征纳入考虑,这可能进一步提升方法的性能。
算法优化:尽管LineGS方法简单高效,但进一步优化算法,特别是在处理大规模数据集时的计算效率和内存使用,也是一个重要的研究方向。
更广泛的数据集测试:目前的实验主要在一些特定的数据集上进行。将方法应用到更广泛的数据集,包括不同类型的场景和更复杂的环境,可以帮助进一步验证和改进方法的鲁棒性和泛化能力。
多模态数据融合:考虑将LineGS方法与其他类型的数据(如RGB图像、深度图等)结合起来,以实现更全面的3D场景理解。
端到端学习框架:探索是否可以将LineGS方法集成到端到端的学习框架中,以直接从图像或其他传感器数据中预测3D线结构。
实时应用:研究如何将LineGS方法适配到实时应用中,例如增强现实(AR)和虚拟现实(VR)。
评估指标的改进:开发更精细的评估指标来衡量3D线段表示的质量,可能包括对线段的几何属性和语义信息的综合评估。
跨模态一致性:研究如何在不同模态(如图像、点云、高斯模型)之间保持线段表示的一致性。
噪声和异常值的处理:研究更先进的噪声过滤和异常值处理技术,以提高线段重建在复杂环境中的鲁棒性。
这些方向不仅可以推动3D线段表示技术的发展,还可能对计算机视觉和3D场景理解的其它领域产生积极影响。
Q: 总结一下论文的主要内容
A: 这篇论文的主要内容包括以下几个方面:
问题陈述:论文指出了在计算机视觉中,特别是在3D场景理解领域,抽象表示(如线段)对于捕获场景结构特征的重要性,以及现有3D线重建方法面临的挑战,包括基于2D投影的方法的不稳定性以及直接3D方法中的噪声和稀疏性问题。
方法介绍:提出了LineGS,一种新颖的方法,它结合了几何引导的3D线重建和3D高斯绘制模型,以提高3D结构的表示能力。LineGS利用沿场景边缘的高密度高斯点分布来优化和调整从传统几何方法生成的初始线段。
技术细节:
- 3D高斯绘制:介绍了3D高斯绘制的背景,包括其在渲染和训练过程中的效率和能力。
- 几何引导的线段重建问题:讨论了现有几何引导方法的局限性,包括位置偏差、过延伸、离群点、重复和不连续性问题。
- 线段后处理:详细描述了使用3D高斯点对线段进行后处理的方法,包括位置校正、端点裁剪、离群点移除以及处理重复和不连续性问题。
评估方法:提出了一种自定义的评估方法,用于定量评估3D线段对场景的空间和颜色特征以及3D高斯模型中心分布的表示能力。
实验:在多个数据集上进行了实验,包括ABC-NEF、Deep Blending数据集和Mip-NeRF360数据集,以验证LineGS方法的有效性。实验结果显示,LineGS在几何精度和模型紧凑性方面相较于基线方法有显著改进。
结论:总结了LineGS方法的贡献,并指出了未来的研究方向,包括结合更先进的线重建方法和考虑高斯模型的非空间特征。
论文的主要贡献在于提出了一种结合几何方法和3D高斯模型的3D线重建方法,通过后处理优化初始线段,实现了对3D结构更精确和可靠的表示,并提供了评估3D线段表示能力的新方法。
Q: 想要进一步了解论文
A: 以上只是了解一篇论文的几个基本FAQ。如果你还想与Kimi进一步讨论该论文,请点击 这里 为你跳转Kimi AI网页版,并启动一个与该论文相关的新会话。
点此查看论文截图