⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-01-21 更新
GSTAR: Gaussian Surface Tracking and Reconstruction
Authors:Chengwei Zheng, Lixin Xue, Juan Zarate, Jie Song
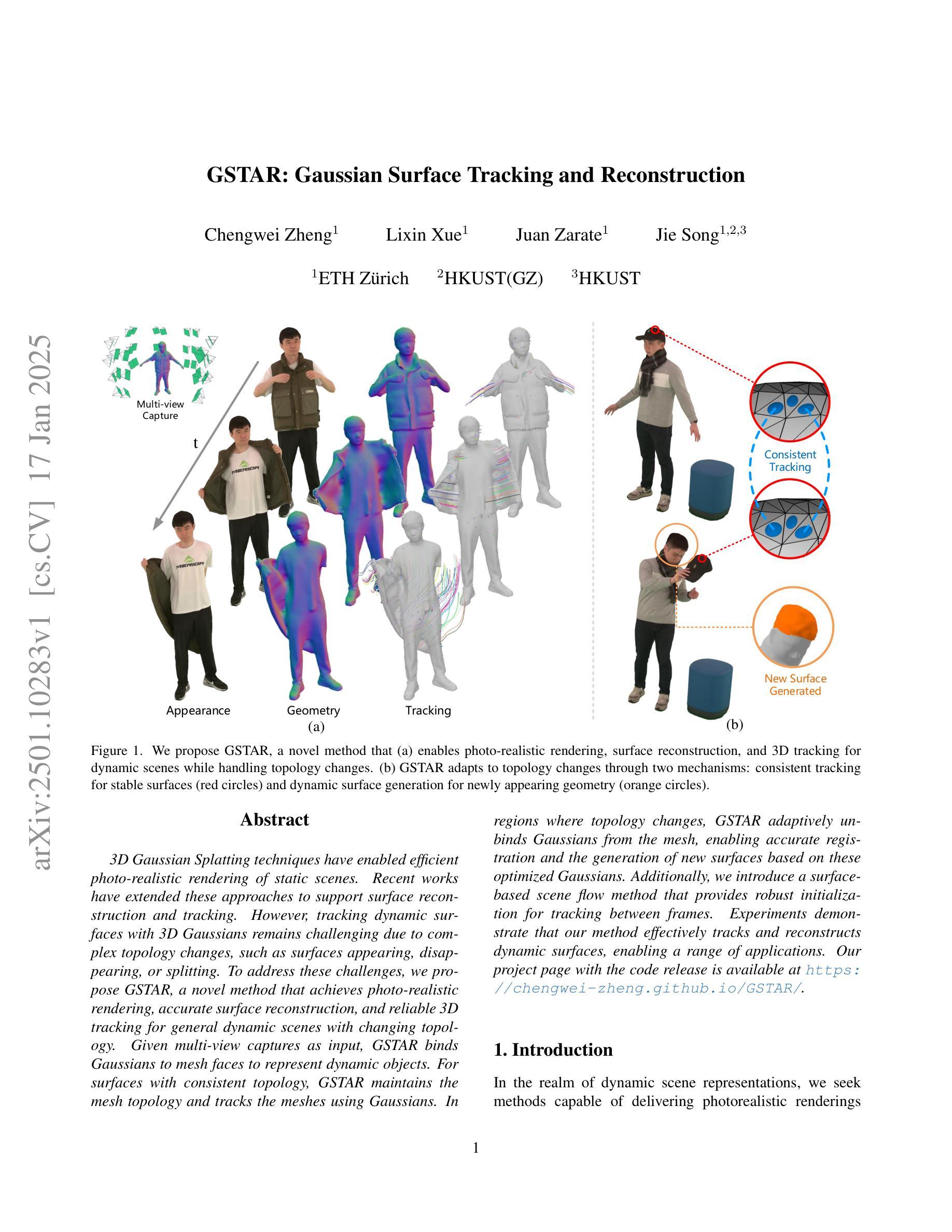
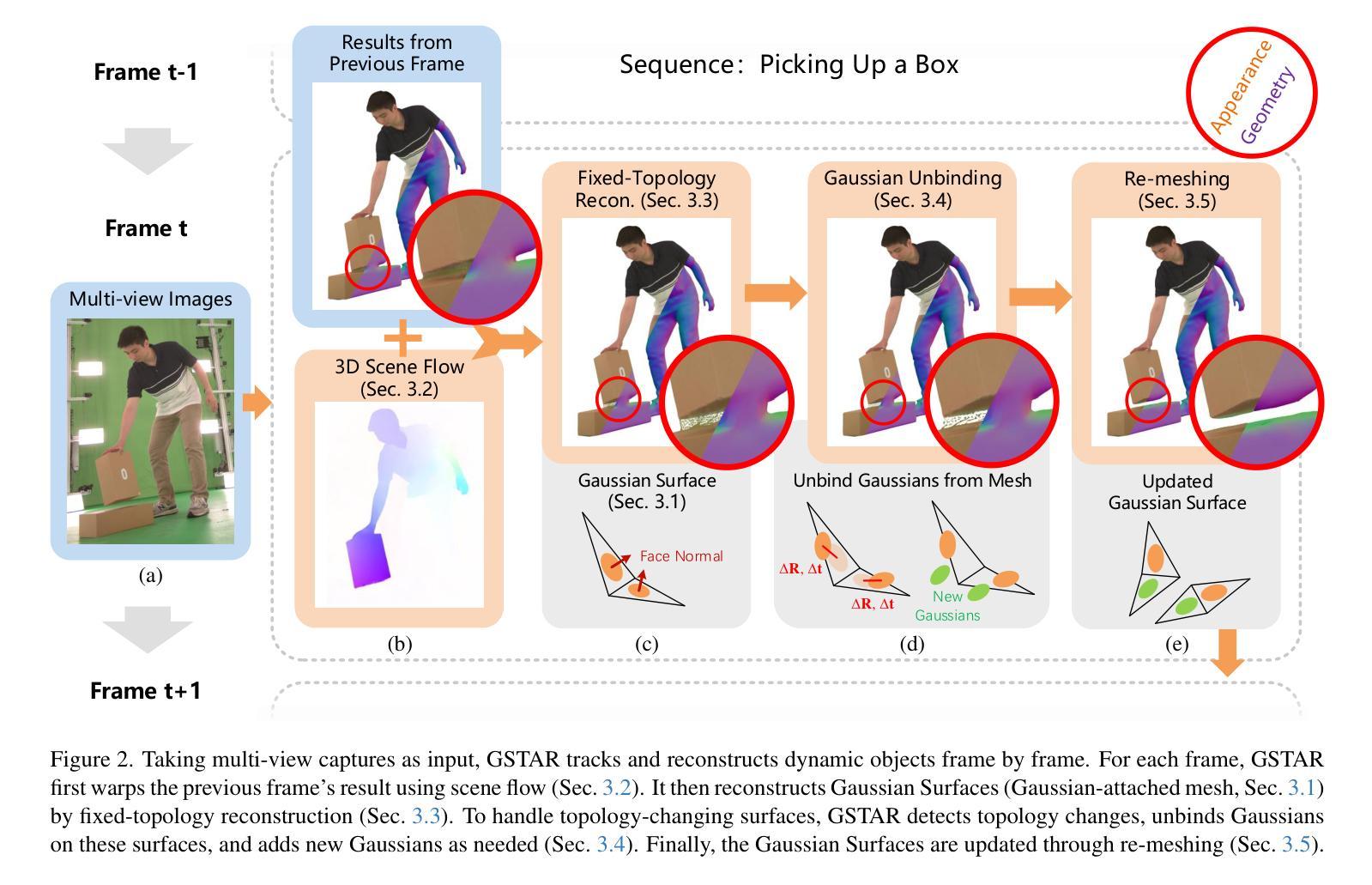
3D Gaussian Splatting techniques have enabled efficient photo-realistic rendering of static scenes. Recent works have extended these approaches to support surface reconstruction and tracking. However, tracking dynamic surfaces with 3D Gaussians remains challenging due to complex topology changes, such as surfaces appearing, disappearing, or splitting. To address these challenges, we propose GSTAR, a novel method that achieves photo-realistic rendering, accurate surface reconstruction, and reliable 3D tracking for general dynamic scenes with changing topology. Given multi-view captures as input, GSTAR binds Gaussians to mesh faces to represent dynamic objects. For surfaces with consistent topology, GSTAR maintains the mesh topology and tracks the meshes using Gaussians. In regions where topology changes, GSTAR adaptively unbinds Gaussians from the mesh, enabling accurate registration and the generation of new surfaces based on these optimized Gaussians. Additionally, we introduce a surface-based scene flow method that provides robust initialization for tracking between frames. Experiments demonstrate that our method effectively tracks and reconstructs dynamic surfaces, enabling a range of applications. Our project page with the code release is available at https://chengwei-zheng.github.io/GSTAR/.
3D高斯融合技术已经实现了静态场景的高效逼真渲染。近期的研究已经扩展了这些方法以支持表面重建和跟踪。然而,使用3D高斯跟踪动态表面仍然具有挑战性,这是由于拓扑的复杂变化,例如表面的出现、消失或分裂。为了解决这些挑战,我们提出了GSTAR,这是一种新的方法,它实现了拓扑变化的通用动态场景的逼真渲染、准确的表面重建和可靠的3D跟踪。给定多视图捕获作为输入,GSTAR将高斯绑定到网格面上以表示动态对象。对于具有一致拓扑的表面,GSTAR保持网格拓扑并使用高斯进行跟踪。在拓扑变化区域,GSTAR自适应地从网格解绑高斯,实现准确的注册和基于这些优化高斯生成新表面。此外,我们引入了一种基于表面的场景流方法,为帧间跟踪提供稳健的初始化。实验表明,我们的方法可以有效地跟踪和重建动态表面,从而支持一系列应用。我们的项目页面及代码发布可在https://chengwei-zheng.github.io/GSTAR/找到。
论文及项目相关链接
Summary
本文介绍了使用三维高斯融合技术(GSTAR)实现动态场景的光照真实渲染、表面重建和可靠的三维跟踪的方法。该方法针对具有复杂拓扑变化的动态表面跟踪问题,通过多视角捕捉输入,将高斯绑定到网格面以表示动态物体。对于拓扑一致的表面,GSTAR使用高斯进行网格跟踪;在拓扑变化区域,GSTAR自适应地将高斯与网格解绑,实现准确注册和基于优化高斯生成新表面。此外,还引入了一种基于表面的场景流方法,为帧间跟踪提供稳健初始化。实验证明,该方法能有效跟踪和重建动态表面,为各种应用提供了支持。项目代码已发布在网站上(链接)。
Key Takeaways
- 三维高斯融合技术(GSTAR)能够实现对动态场景的光照真实渲染、表面重建和可靠的三维跟踪。
- GSTAR通过多视角捕捉输入,将高斯绑定到网格面表示动态物体,处理复杂拓扑变化的动态表面跟踪问题。
- 对于拓扑一致的表面,使用高斯进行网格跟踪;在拓扑变化区域,自适应地将高斯与网格解绑,实现准确注册和基于优化高斯生成新表面。
- GSTAR引入了一种基于表面的场景流方法,为帧间跟踪提供稳健初始化。
- 实验证明,GSTAR能有效跟踪和重建动态表面。
- GSTAR的应用范围广泛,可以应用于多种领域。
点此查看论文截图
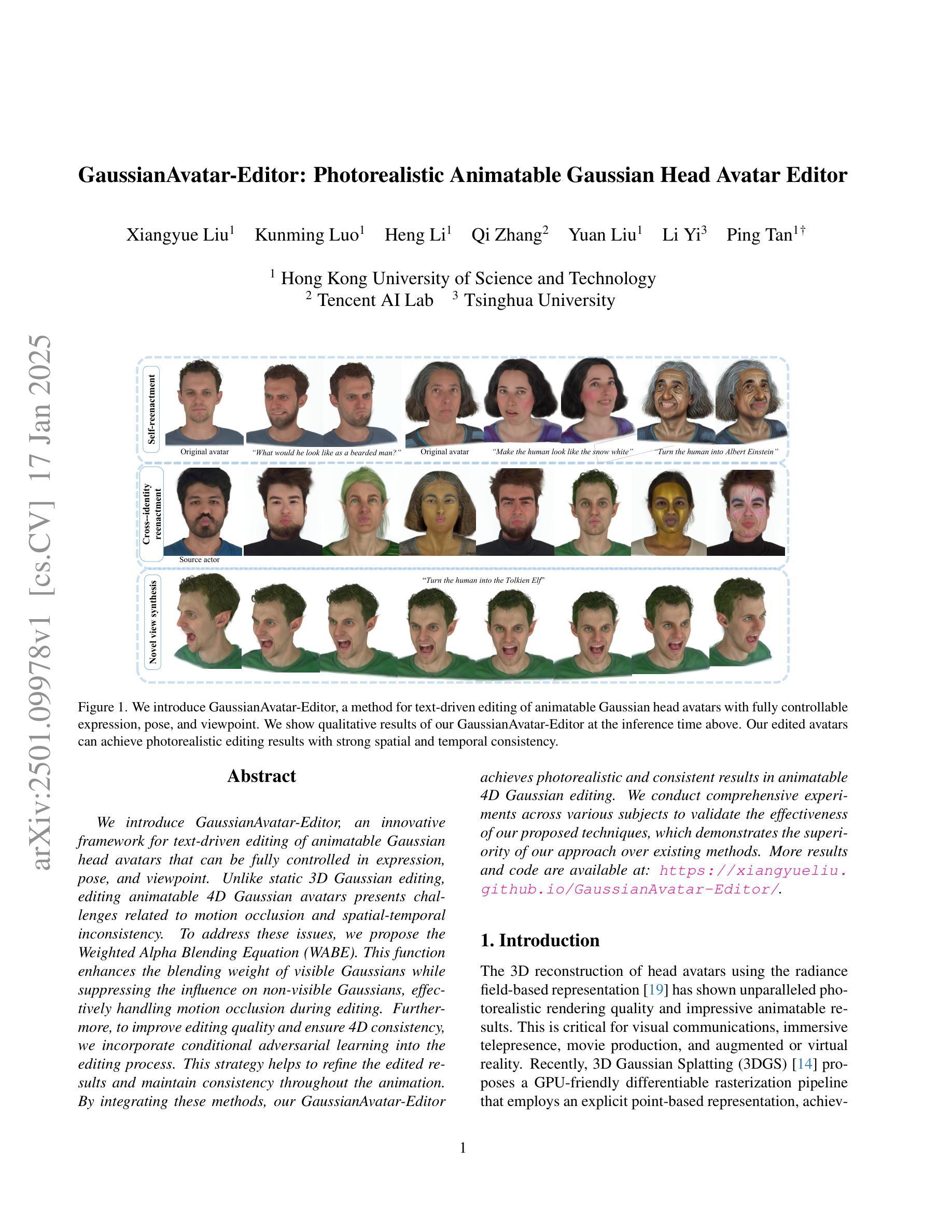
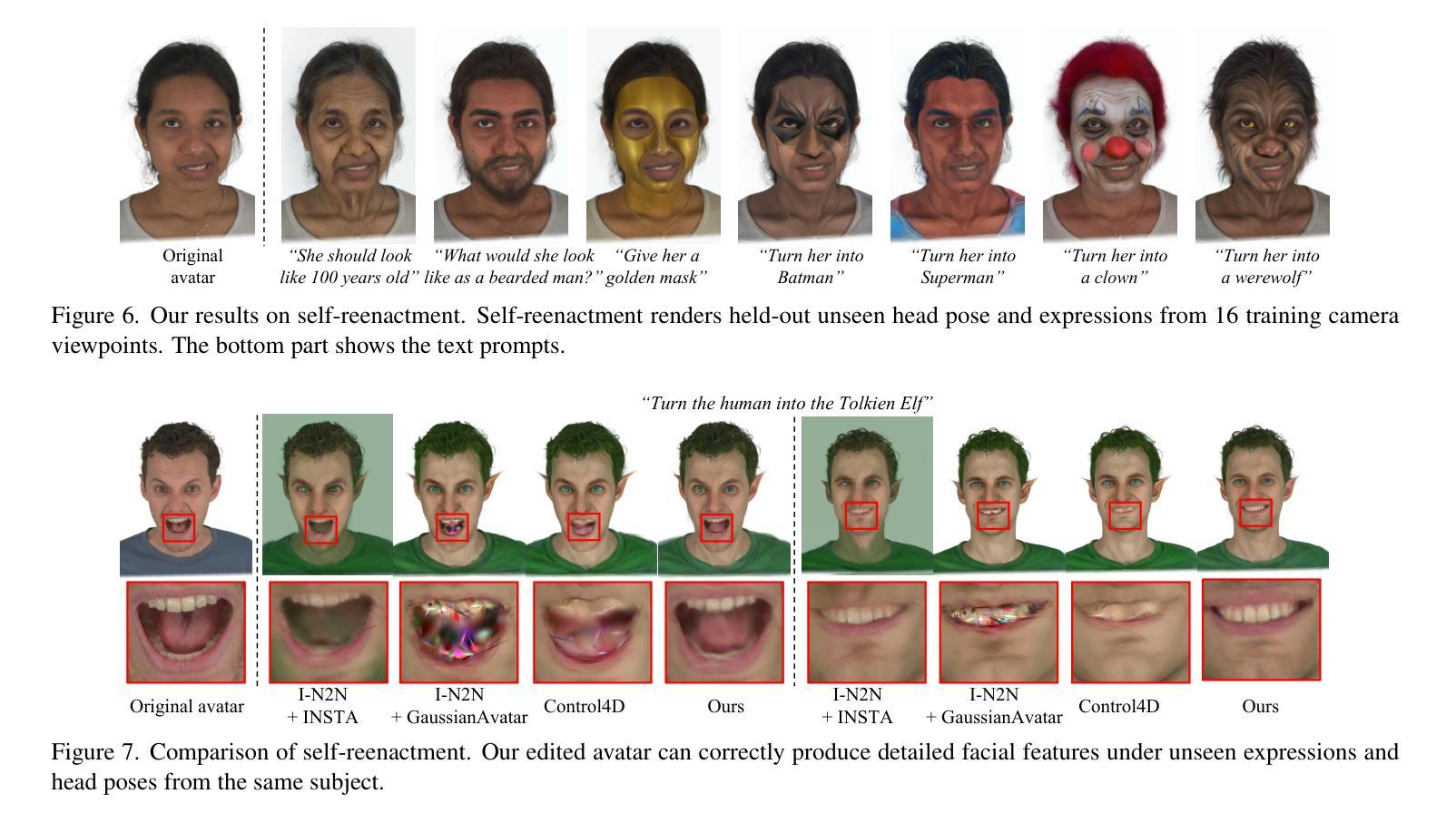
GaussianAvatar-Editor: Photorealistic Animatable Gaussian Head Avatar Editor
Authors:Xiangyue Liu, Kunming Luo, Heng Li, Qi Zhang, Yuan Liu, Li Yi, Ping Tan
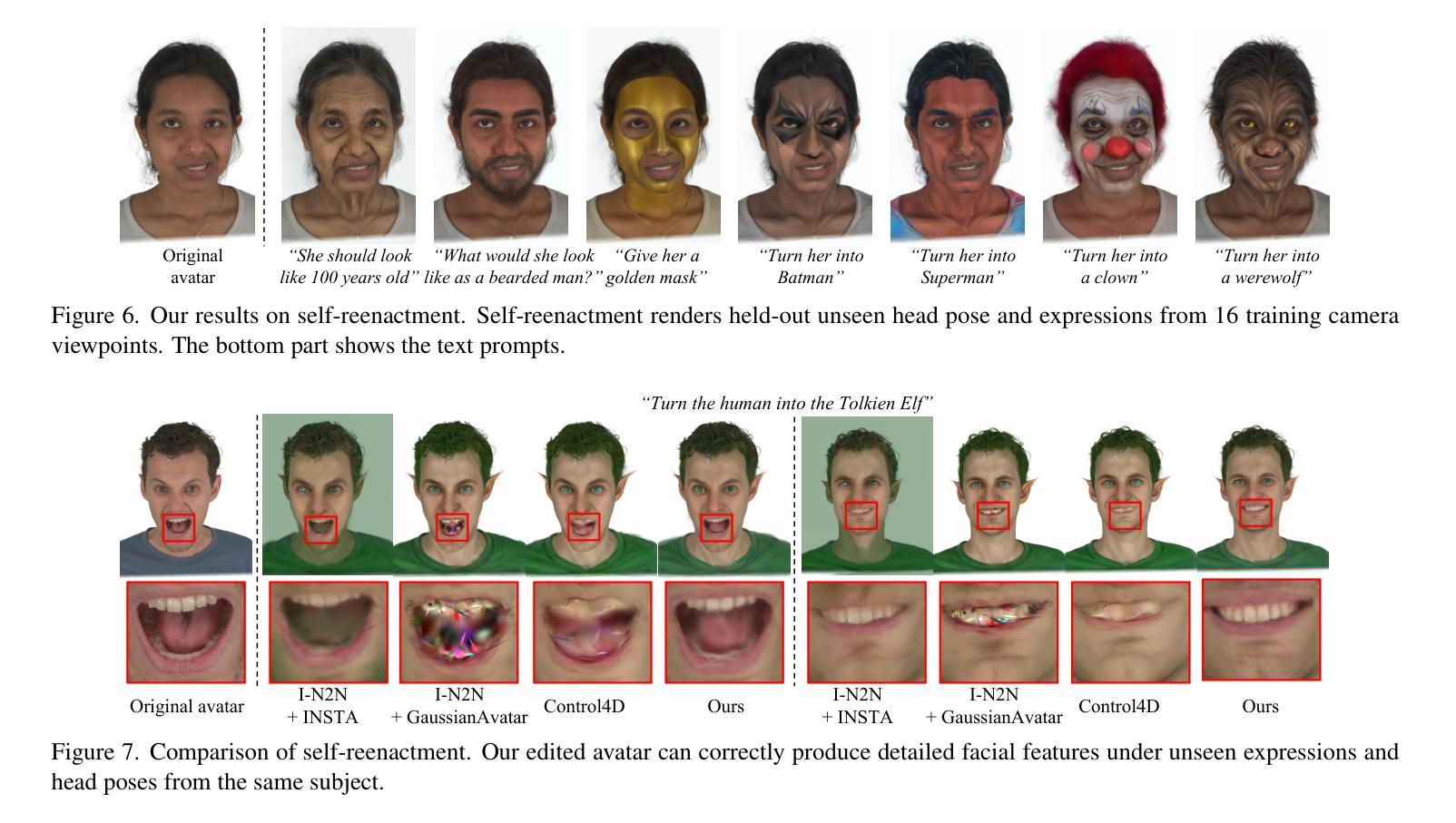
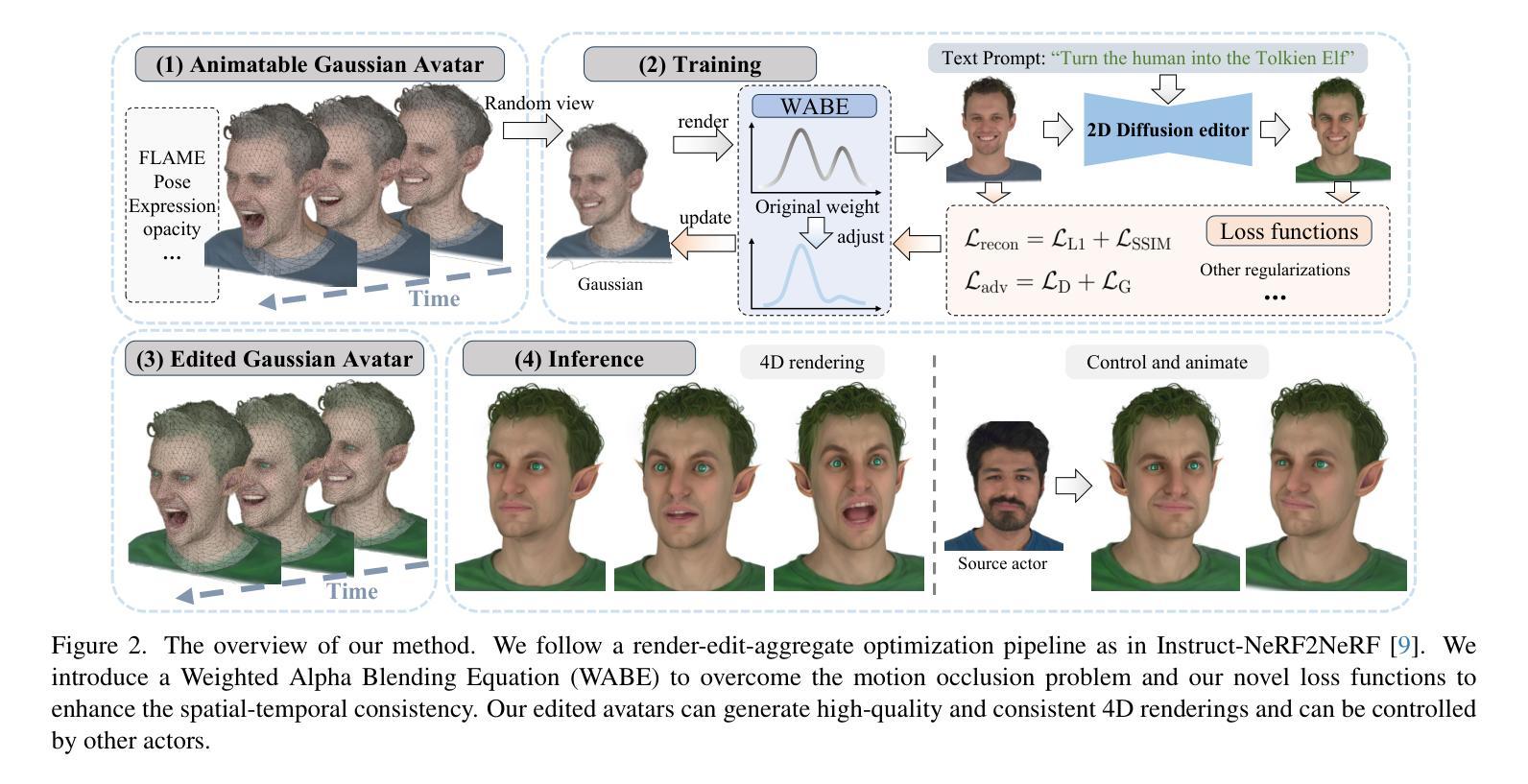
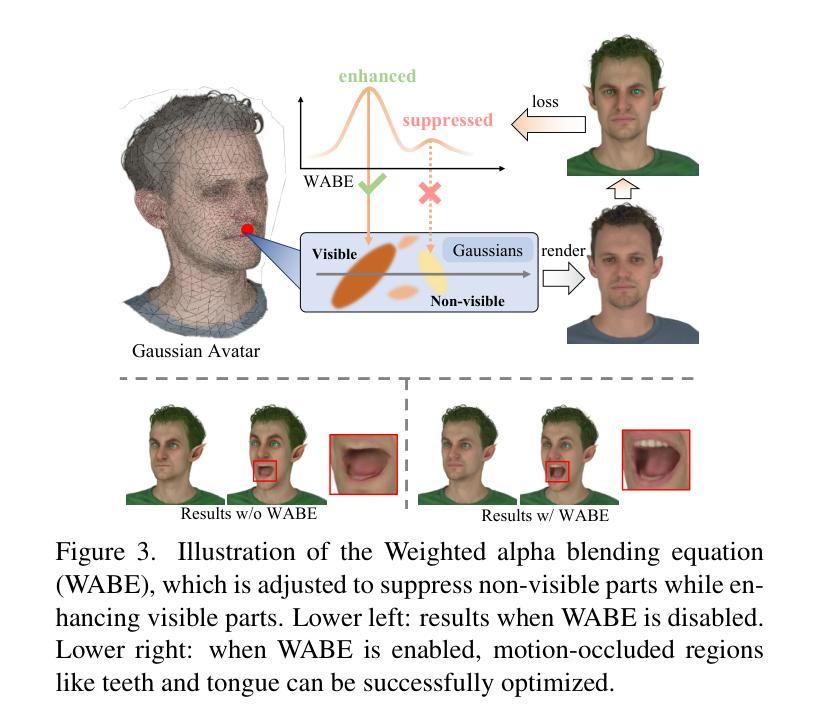
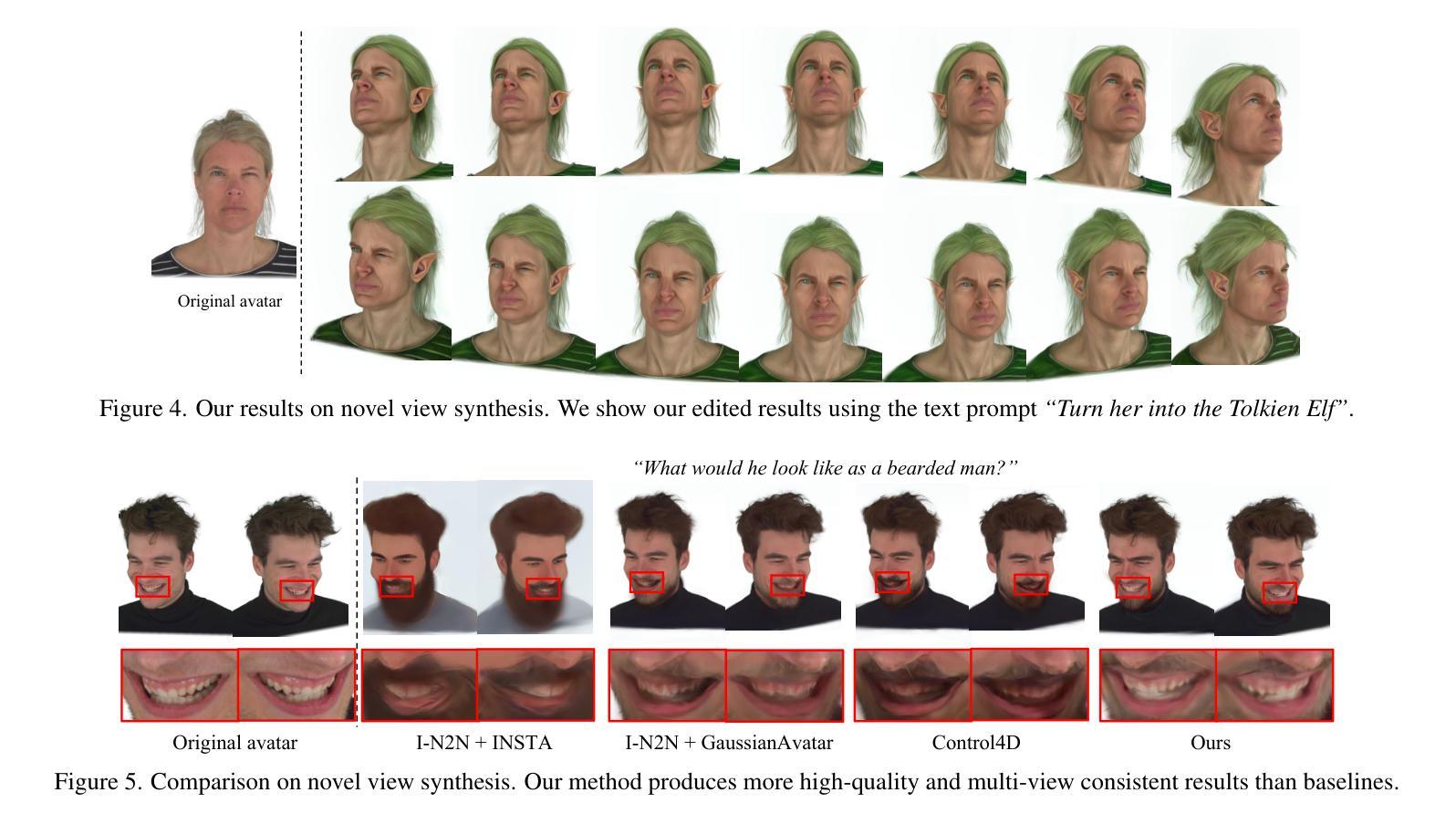
We introduce GaussianAvatar-Editor, an innovative framework for text-driven editing of animatable Gaussian head avatars that can be fully controlled in expression, pose, and viewpoint. Unlike static 3D Gaussian editing, editing animatable 4D Gaussian avatars presents challenges related to motion occlusion and spatial-temporal inconsistency. To address these issues, we propose the Weighted Alpha Blending Equation (WABE). This function enhances the blending weight of visible Gaussians while suppressing the influence on non-visible Gaussians, effectively handling motion occlusion during editing. Furthermore, to improve editing quality and ensure 4D consistency, we incorporate conditional adversarial learning into the editing process. This strategy helps to refine the edited results and maintain consistency throughout the animation. By integrating these methods, our GaussianAvatar-Editor achieves photorealistic and consistent results in animatable 4D Gaussian editing. We conduct comprehensive experiments across various subjects to validate the effectiveness of our proposed techniques, which demonstrates the superiority of our approach over existing methods. More results and code are available at: Project Link.
我们介绍了GaussianAvatar-Editor,这是一个创新的文本驱动编辑框架,用于编辑可动画的高斯头像,可在表情、姿势和视角上进行全面控制。与静态的3D高斯编辑不同,编辑可动画的4D高斯头像面临与运动遮挡和时空不一致性相关的挑战。为了解决这些问题,我们提出了加权阿尔法混合方程(WABE)。该函数增强了可见高斯混合权重的同时抑制了非可见高斯的影响,有效地处理了编辑过程中的运动遮挡问题。此外,为了提高编辑质量和确保4D一致性,我们将条件对抗性学习融入到编辑过程中。这一策略有助于细化编辑结果并保持动画的一致性。通过整合这些方法,我们的GaussianAvatar-Editor在可动画的4D高斯编辑中实现了逼真的和一致的结果。我们进行了全面的实验,对不同的主题进行了验证,证明了我们的技术相较于现有方法的优越性。更多结果和代码可访问:项目链接。
论文及项目相关链接
PDF Accepted to 3DV 2025. Project Link
Summary
高斯Avatar编辑器是一个用于文本驱动的可编辑动画高斯头像框架,可实现表情、姿势和视点的全面控制。为解决动画四维高斯头像编辑中的运动遮挡和时空不一致问题,提出加权阿尔法混合方程(WABE)。结合条件对抗性学习,提高编辑质量,确保四维一致性。综合这些方法,高斯Avatar编辑器在动画四维高斯编辑中实现逼真且一致的结果。
Key Takeaways
- 介绍高斯Avatar编辑器:一个创新的文本驱动编辑框架,用于控制动画高斯头像的表达、姿势和视点。
- 面临挑战:动画四维高斯编辑中的运动遮挡和时空不一致问题。
- 解决方案:提出加权阿尔法混合方程(WABE),解决运动遮挡问题。
- 提高编辑质量和四维一致性:结合条件对抗性学习。
- 该编辑器实现动画四维高斯编辑的逼真且一致结果。
- 通过综合实验验证了所提出技术的有效性。
点此查看论文截图
Beyond Uncertainty: Risk-Aware Active View Acquisition for Safe Robot Navigation and 3D Scene Understanding with FisherRF
Authors:Guangyi Liu, Wen Jiang, Boshu Lei, Vivek Pandey, Kostas Daniilidis, Nader Motee
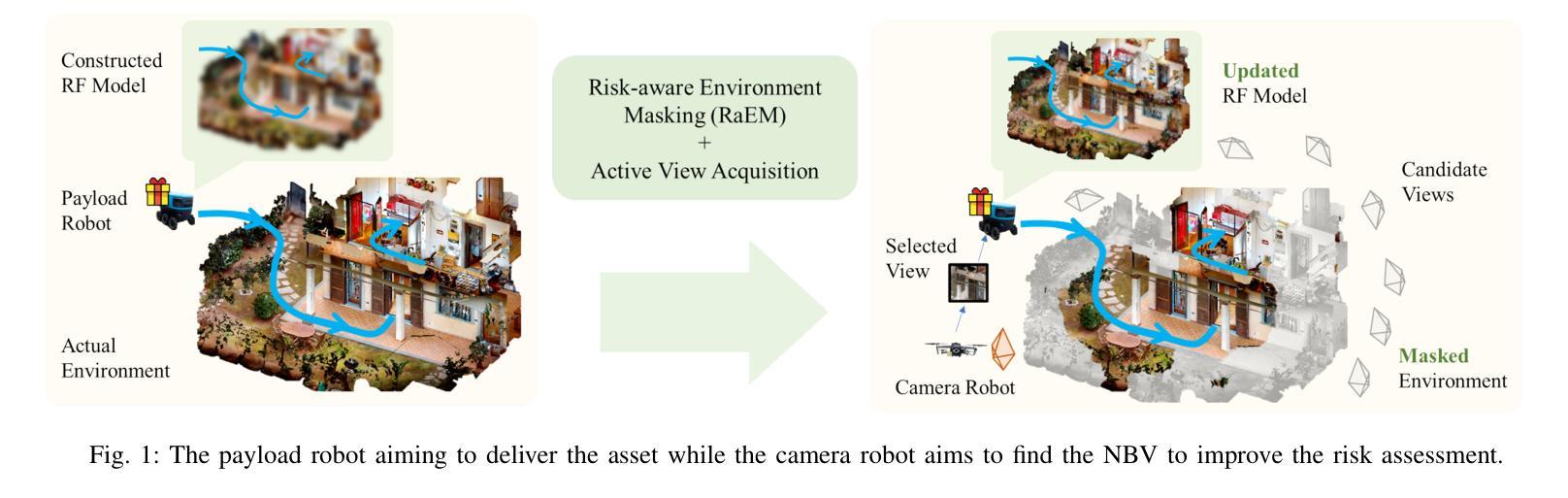
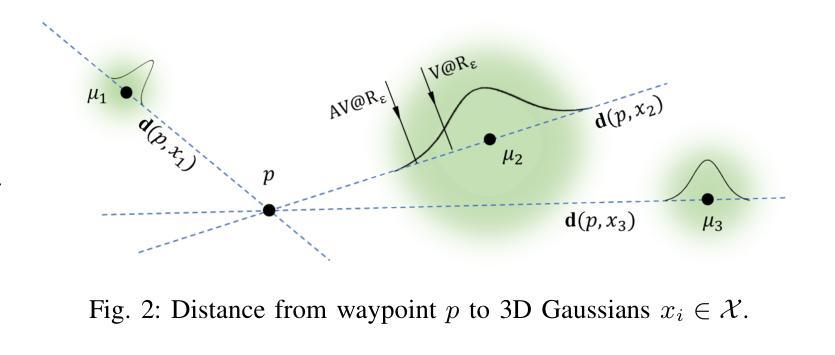
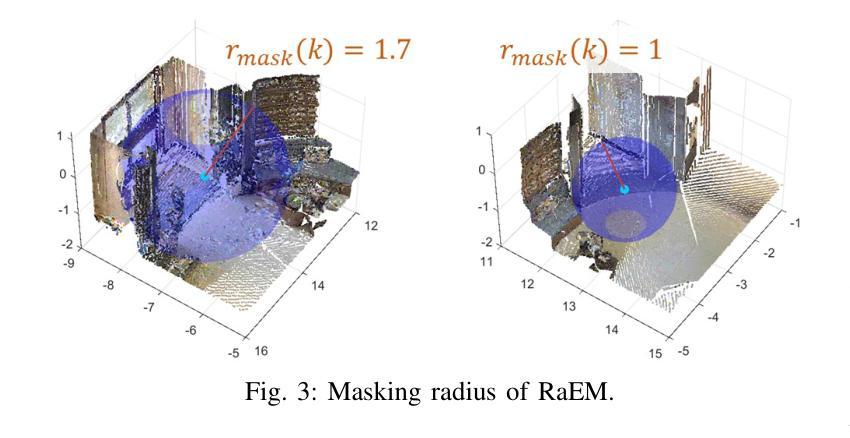
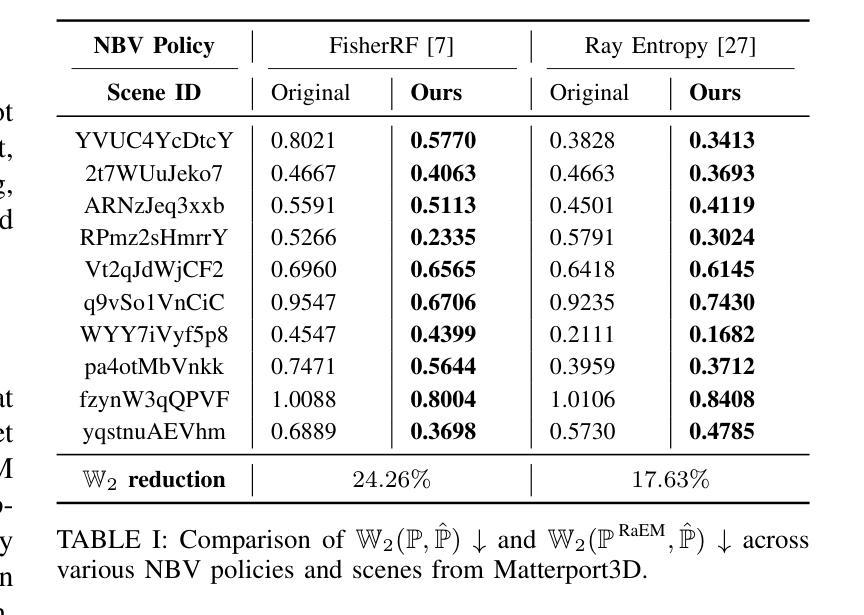
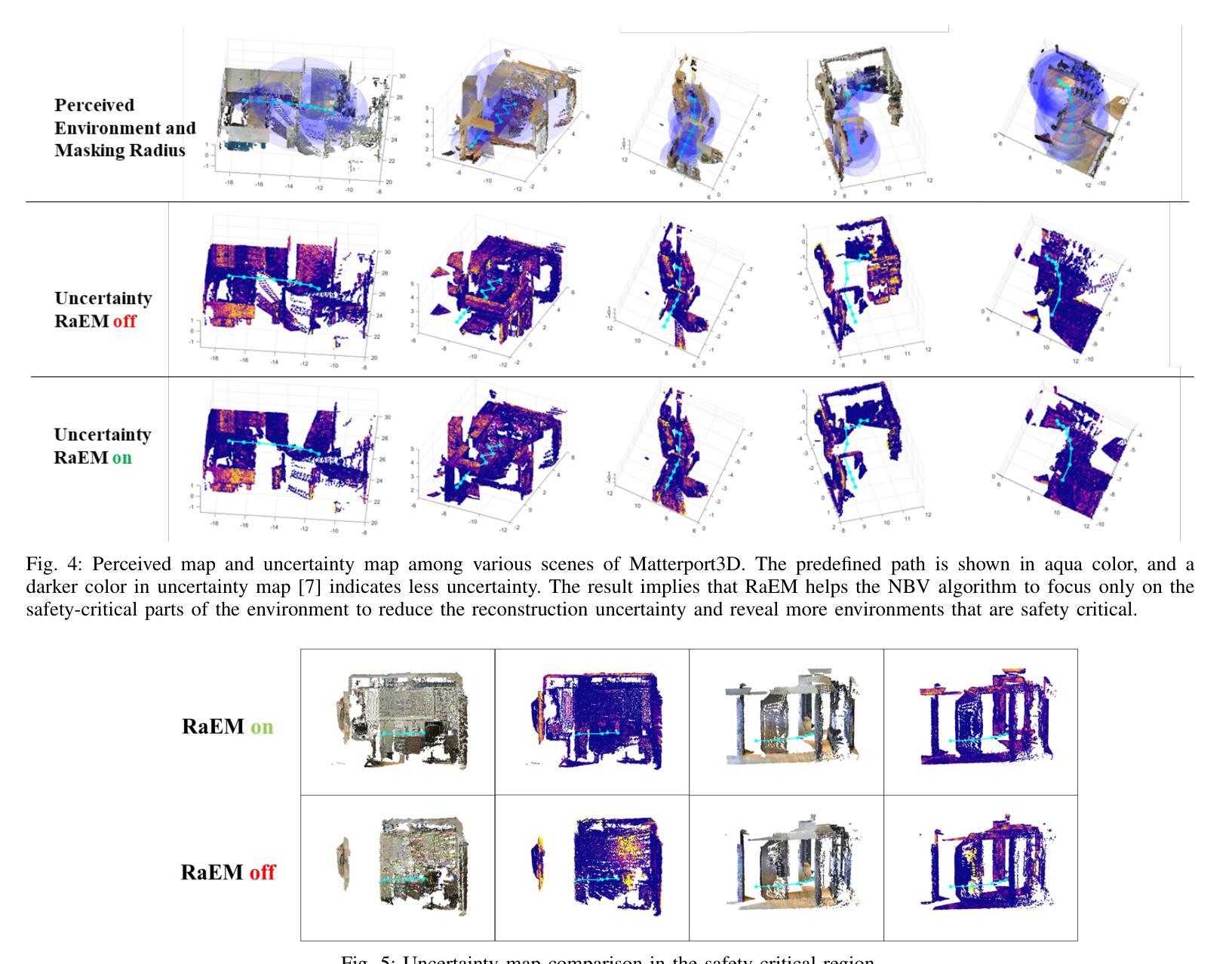
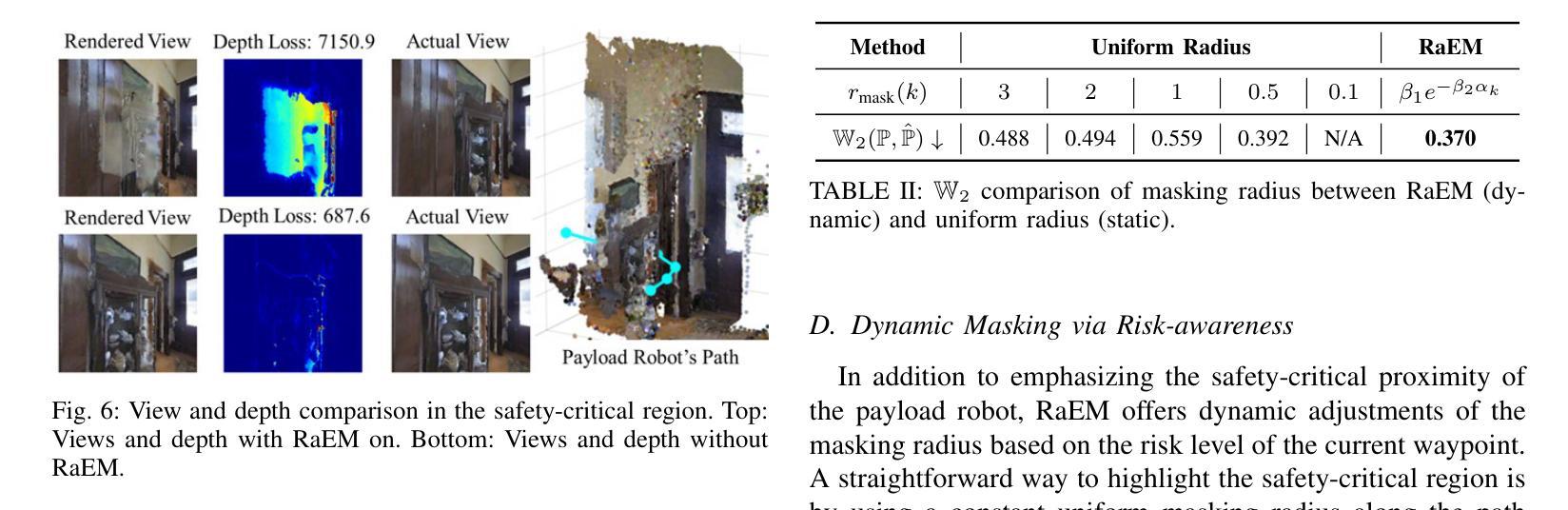
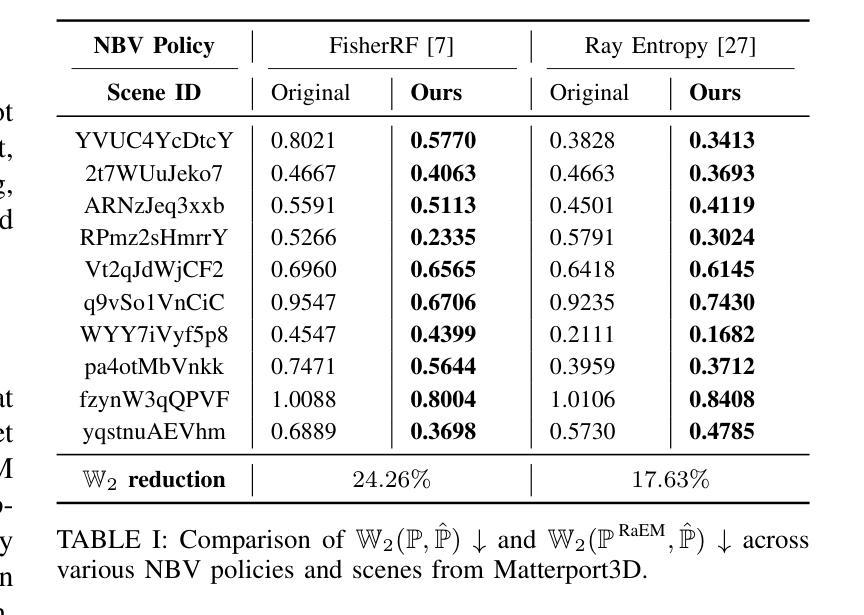
The active view acquisition problem has been extensively studied in the context of robot navigation using NeRF and 3D Gaussian Splatting. To enhance scene reconstruction efficiency and ensure robot safety, we propose the Risk-aware Environment Masking (RaEM) framework. RaEM leverages coherent risk measures to dynamically prioritize safety-critical regions of the unknown environment, guiding active view acquisition algorithms toward identifying the next-best-view (NBV). Integrated with FisherRF, which selects the NBV by maximizing expected information gain, our framework achieves a dual objective: improving robot safety and increasing efficiency in risk-aware 3D scene reconstruction and understanding. Extensive high-fidelity experiments validate the effectiveness of our approach, demonstrating its ability to establish a robust and safety-focused framework for active robot exploration and 3D scene understanding.
在利用NeRF和3D高斯贴图进行机器人导航的上下文中,主动视图获取问题已得到了广泛的研究。为了提升场景重建效率并确保机器人安全,我们提出了风险意识环境遮蔽(RaEM)框架。RaEM利用连贯的风险衡量来动态地优先处理未知环境中的安全关键区域,引导主动视图获取算法识别下一个最佳视图(NBV)。该框架与FisherRF相结合,通过最大化预期信息增益来选择NBV,从而实现双重目标:提高机器人安全性和提高风险意识下的三维场景重建和理解效率。高保真度的广泛实验验证了我们的方法的有效性,展示了我们为机器人主动探索和三维场景理解建立一个稳健且以安全为重点的框架的能力。
论文及项目相关链接
Summary
该研究针对机器人导航中的主动视图获取问题进行了深入研究,并采用了NeRF和3D高斯Splatting技术。为提高场景重建效率并确保机器人安全,提出了风险意识环境掩蔽(RaEM)框架。该框架利用一致的风险度量来动态优先处理未知环境中的安全关键区域,引导主动视图获取算法识别最佳下一个视图(NBV)。通过与FisherRF集成,通过最大化预期信息收益选择NBV,我们的框架实现了双重目标:提高机器人安全性和提高风险意识下的3D场景重建和理解的效率。大量高保真实验验证了该方法的有效性,证明了其为机器人主动探索和3D场景理解提供了一个稳健且注重安全的框架。
Key Takeaways
- 研究领域:该研究关注机器人导航中的主动视图获取问题,涉及NeRF和3D高斯Splatting技术的应用。
- 提出的框架:提出了风险意识环境掩蔽(RaEM)框架,旨在提高场景重建效率并确保机器人安全。
- 框架工作原理:RaEM框架利用风险度量来优先处理未知环境中的安全关键区域,引导主动视图获取算法识别最佳下一个视图(NBV)。
- 双重目标:通过集成FisherRF并选择最大化预期信息收益的NBV,该框架旨在实现提高机器人安全性和提高风险意识下的3D场景重建和理解效率这两个目标。
- 实验验证:通过大量高保真实验验证了RaEM框架的有效性。
- 框架的稳健性:该框架被证明是一个稳健的框架,适用于机器人主动探索和3D场景理解。
- 焦点:该研究注重在保证安全的前提下进行机器人探索和3D场景理解。
点此查看论文截图