⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-01-25 更新
VIGS SLAM: IMU-based Large-Scale 3D Gaussian Splatting SLAM
Authors:Gyuhyeon Pak, Euntai Kim
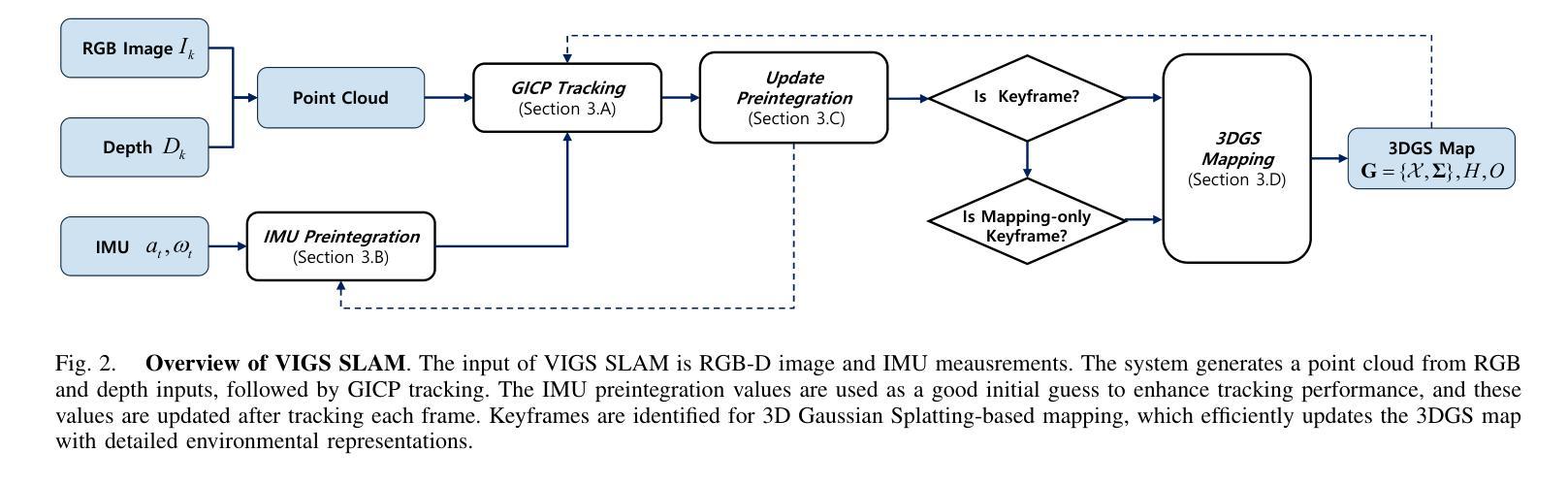
Recently, map representations based on radiance fields such as 3D Gaussian Splatting and NeRF, which excellent for realistic depiction, have attracted considerable attention, leading to attempts to combine them with SLAM. While these approaches can build highly realistic maps, large-scale SLAM still remains a challenge because they require a large number of Gaussian images for mapping and adjacent images as keyframes for tracking. We propose a novel 3D Gaussian Splatting SLAM method, VIGS SLAM, that utilizes sensor fusion of RGB-D and IMU sensors for large-scale indoor environments. To reduce the computational load of 3DGS-based tracking, we adopt an ICP-based tracking framework that combines IMU preintegration to provide a good initial guess for accurate pose estimation. Our proposed method is the first to propose that Gaussian Splatting-based SLAM can be effectively performed in large-scale environments by integrating IMU sensor measurements. This proposal not only enhances the performance of Gaussian Splatting SLAM beyond room-scale scenarios but also achieves SLAM performance comparable to state-of-the-art methods in large-scale indoor environments.
最近,基于辐射场(radiance fields)的地图表示方法,如三维高斯喷绘(3D Gaussian Splatting)和NeRF等,因其对现实场景的逼真描绘而备受关注,并尝试将其与SLAM(Simultaneous Localization and Mapping,即时定位与地图构建)技术相结合。虽然这些方法能够构建高度逼真的地图,但在大规模环境下实现SLAM仍然是一个挑战,因为它们需要大量的高斯图像用于映射和相邻图像作为关键帧用于追踪。我们提出了一种新型的基于三维高斯喷绘的SLAM方法,称为VIGS SLAM,它利用RGB-D和IMU传感器的数据融合,适用于大规模室内环境。为了降低基于3DGS的追踪的计算负荷,我们采用了基于ICP的追踪框架,并结合IMU预积分,为准确的姿态估计提供良好的初始猜测。我们提出的方法是首个将IMU传感器测量值与高斯喷绘SLAM相结合,在大规模环境下有效执行的方法。这一提议不仅提高了高斯喷绘SLAM在超出房间规模场景的性能,而且在室内大规模环境中实现了与最新技术相当的SLAM性能。
论文及项目相关链接
PDF 7 pages, 5 figures
Summary
基于辐射场地图表示(如3D高斯喷绘和NeRF)的方法因其逼真的描绘能力而备受关注,结合SLAM技术,可实现大规模环境下的高精度地图构建。本文提出了一种新型的基于3D高斯喷绘的SLAM方法——VIGS SLAM,该方法融合了RGB-D和IMU传感器信息,适用于大规模室内环境。通过采用ICP跟踪框架和IMU预积分技术,减少了3DGS跟踪的计算负担,实现了高斯喷绘SLAM在大型环境中的有效应用,并达到了与现有先进技术相当的SLAM性能。
Key Takeaways
- 基于辐射场(如3D高斯喷绘和NeRF)的地图表示方法因其逼真的描绘能力而备受关注。
- 尝试将此类方法与SLAM结合以构建大规模地图。
- 提出了一种新型的基于3D高斯喷绘的SLAM方法——VIGS SLAM。
- VIGS SLAM融合了RGB-D和IMU传感器信息,适用于大规模室内环境。
- 采用ICP跟踪框架减少计算负担。
- IMU预积分技术为姿态估计提供了良好的初始猜测。
点此查看论文截图



MeshLRM: Large Reconstruction Model for High-Quality Meshes
Authors:Xinyue Wei, Kai Zhang, Sai Bi, Hao Tan, Fujun Luan, Valentin Deschaintre, Kalyan Sunkavalli, Hao Su, Zexiang Xu
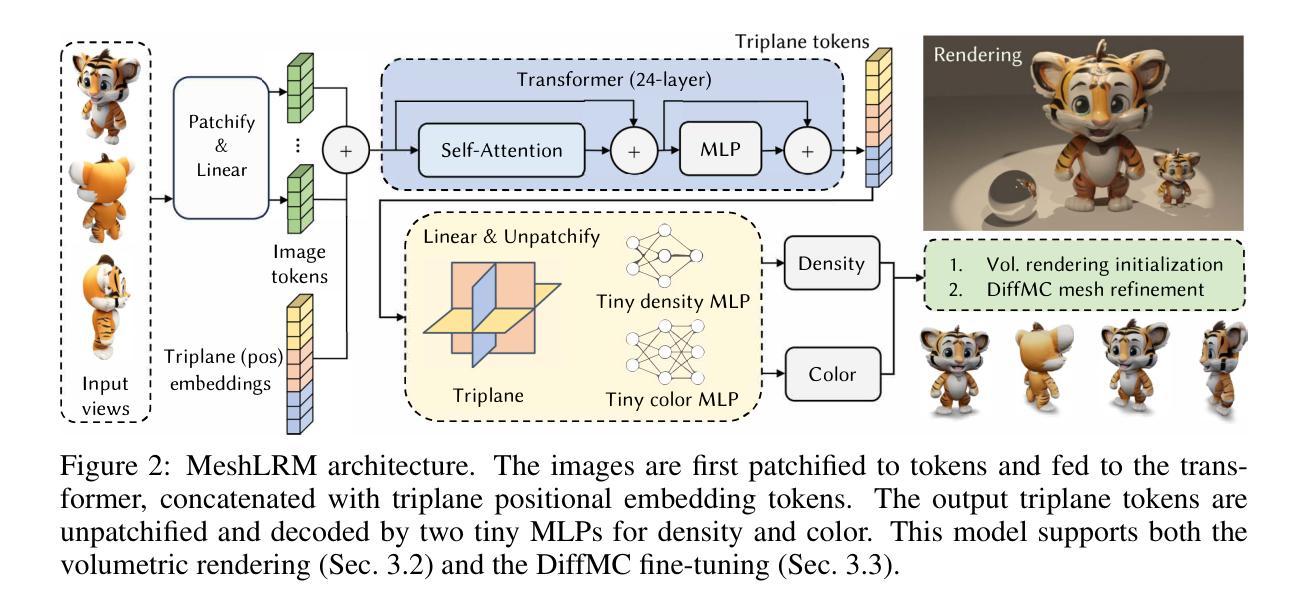
We propose MeshLRM, a novel LRM-based approach that can reconstruct a high-quality mesh from merely four input images in less than one second. Different from previous large reconstruction models (LRMs) that focus on NeRF-based reconstruction, MeshLRM incorporates differentiable mesh extraction and rendering within the LRM framework. This allows for end-to-end mesh reconstruction by fine-tuning a pre-trained NeRF LRM with mesh rendering. Moreover, we improve the LRM architecture by simplifying several complex designs in previous LRMs. MeshLRM’s NeRF initialization is sequentially trained with low- and high-resolution images; this new LRM training strategy enables significantly faster convergence and thereby leads to better quality with less compute. Our approach achieves state-of-the-art mesh reconstruction from sparse-view inputs and also allows for many downstream applications, including text-to-3D and single-image-to-3D generation. Project page: https://sarahweiii.github.io/meshlrm/
我们提出了MeshLRM,这是一种基于LRM的新型方法,可以从仅仅四张输入图像在不到一秒的时间内重建出高质量网格。不同于之前专注于基于NeRF重建的大型重建模型(LRM),MeshLRM在LRM框架中结合了可微分的网格提取和渲染。这允许通过微调预训练的NeRF LRM来进行端到端的网格重建,并使用网格渲染。此外,我们简化了之前LRM中的几个复杂设计,改进了LRM架构。MeshLRM的NeRF初始化按序与低分辨率和高分辨率图像进行训练;这种新型的LRM训练策略实现了更快的收敛速度,从而以较少的计算量达到了更好的质量。我们的方法实现了稀疏视图输入的先进网格重建,并且还支持许多下游应用,包括文本到3D和单图像到3D生成。项目页面:https://sarahweiii.github.io/meshlrm/
论文及项目相关链接
Summary
MeshLRM是一种基于LRM的新方法,可以从四张图像在一秒内重建高质量网格。与专注于NeRF重建的大型重建模型(LRMs)不同,MeshLRM在LRM框架中结合了可微分网格提取和渲染。这使得通过微调预训练的NeRF LRM并利用网格渲染实现端到端的网格重建成为可能。此外,通过简化之前的LRM中的几个复杂设计,我们改进了LRM架构。MeshLRM的NeRF初始化采用低分辨率和高分辨率图像进行顺序训练;这种新型的LRM训练策略使得收敛速度大大加快,并因此在较低计算量下实现更高质量。我们的方法实现了从稀疏视角输入的最新网格重建技术,并可用于文本到3D和单图像到3D生成等下游应用。
Key Takeaways
- MeshLRM是一种基于LRM的网格重建新方法,可从四张图像快速重建高质量网格。
- 与其他专注于NeRF重建的LRMs不同,MeshLRM结合了可微分网格提取和渲染。
- MeshLRM实现了端到端的网格重建,通过微调预训练的NeRF LRM并利用网格渲染。
- 改进了LRM架构,简化了之前的复杂设计。
- MeshLRM的NeRF初始化采用低分辨率和高分辨率图像顺序训练,实现快速收敛和高质量。
- MeshLRM达到了从稀疏视角输入的最新网格重建技术。
点此查看论文截图