⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-04-09 更新
A Self-Supervised Learning Approach with Differentiable Optimization for UAV Trajectory Planning
Authors:Yufei Jiang, Yuanzhu Zhan, Harsh Vardhan Gupta, Chinmay Borde, Junyi Geng
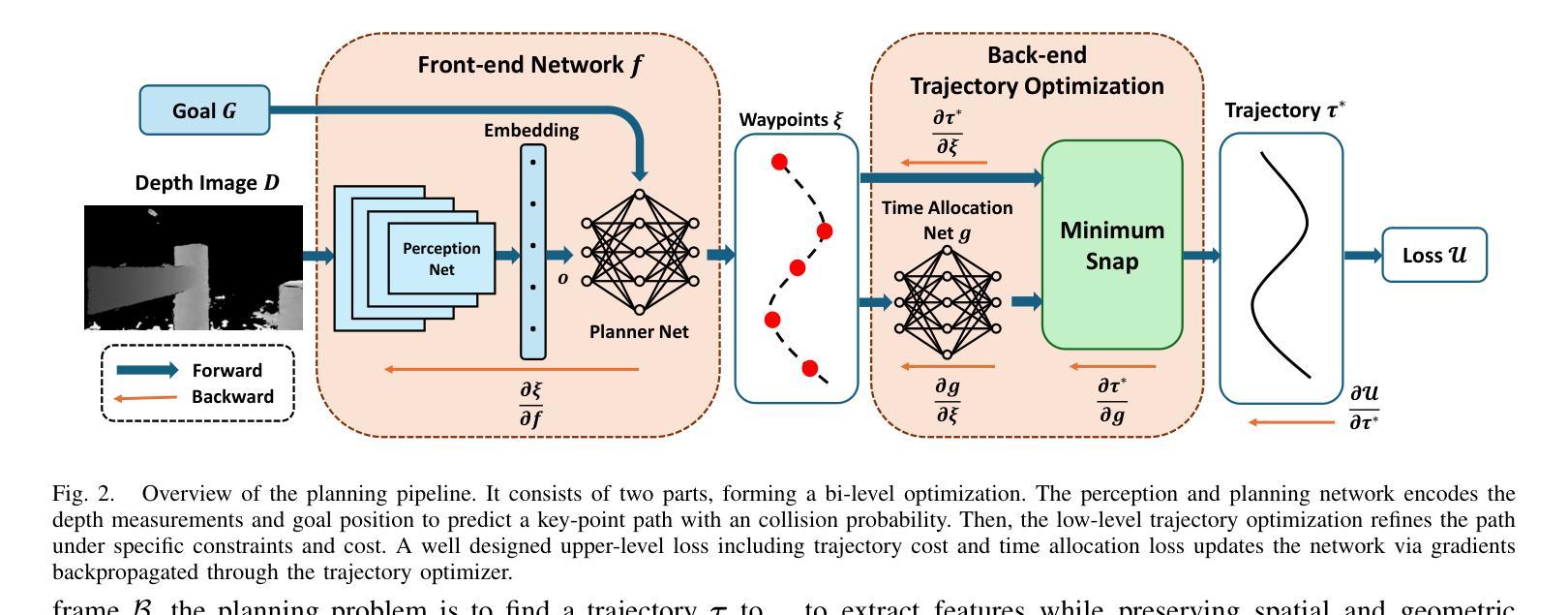
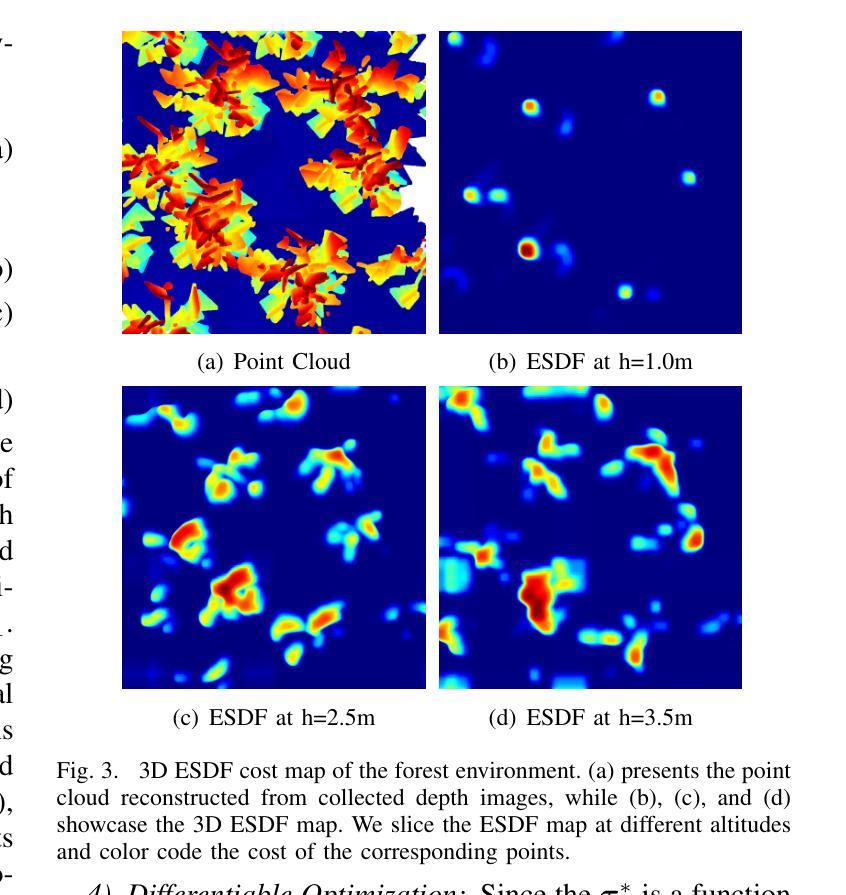
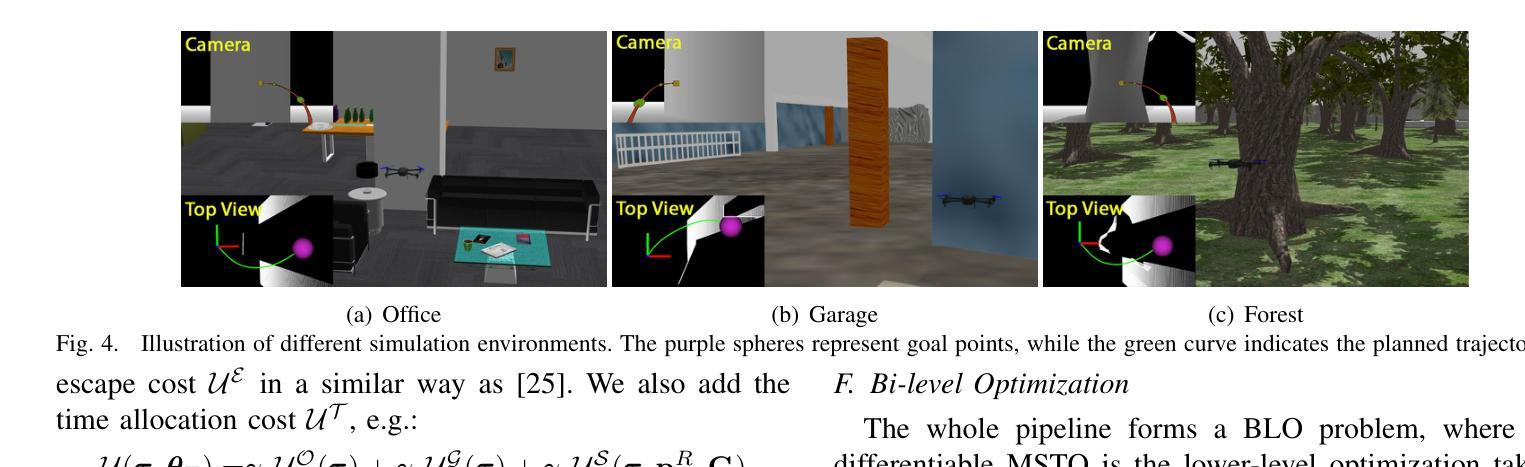
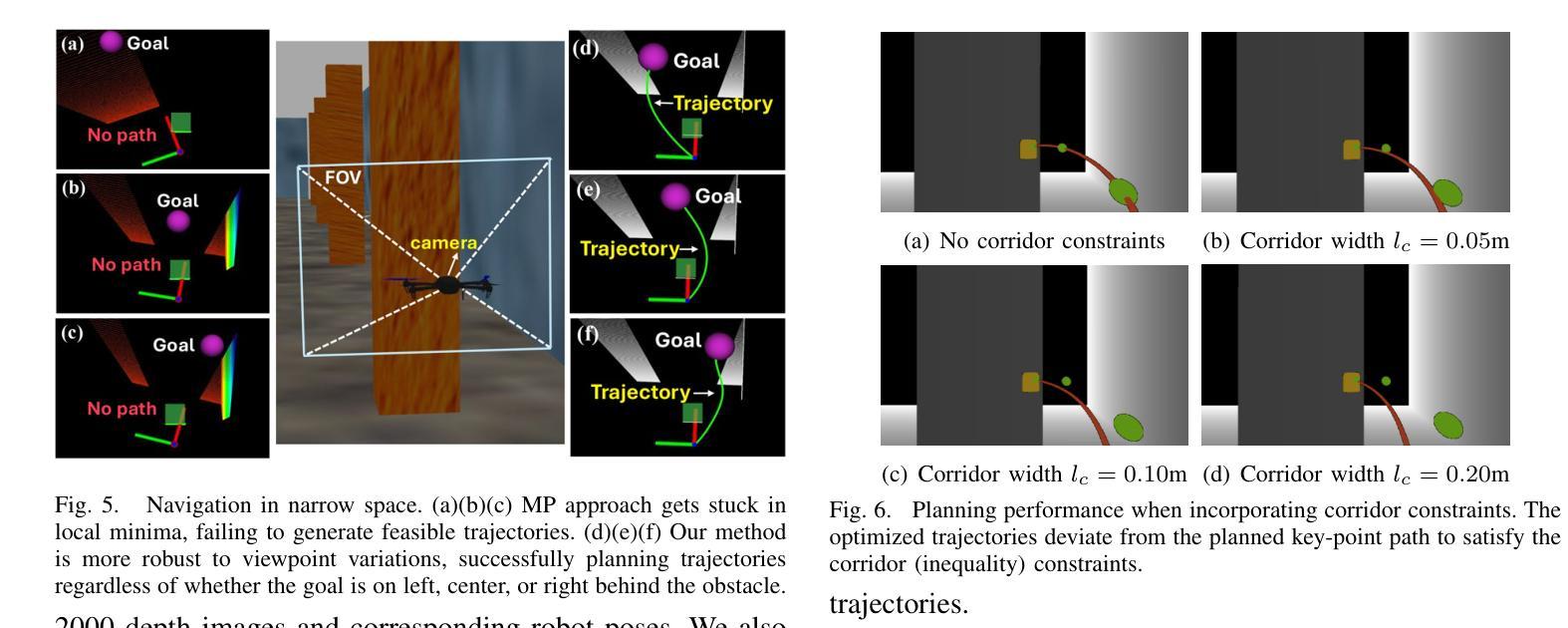
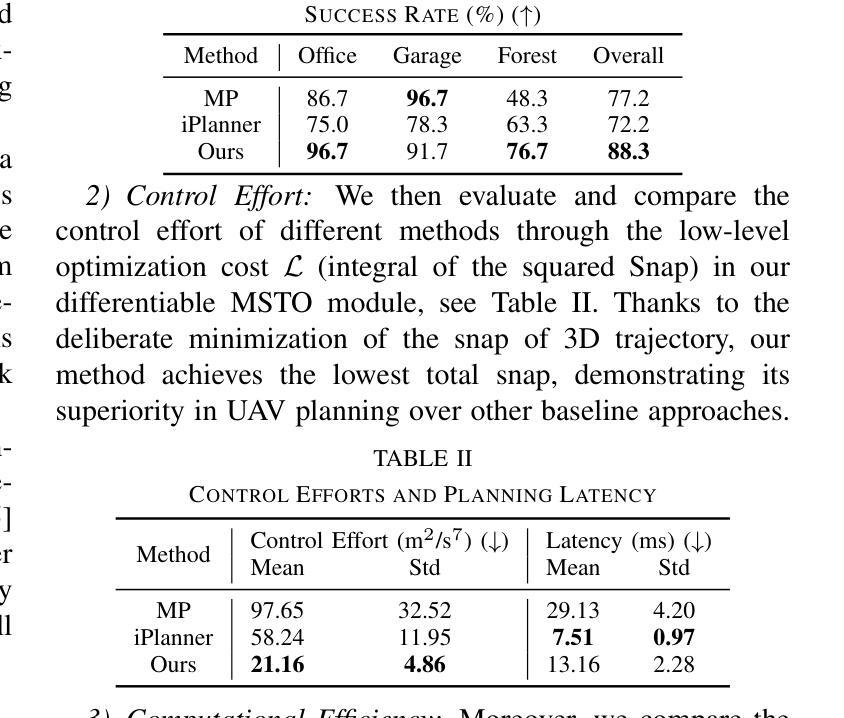
While Unmanned Aerial Vehicles (UAVs) have gained significant traction across various fields, path planning in 3D environments remains a critical challenge, particularly under size, weight, and power (SWAP) constraints. Traditional modular planning systems often introduce latency and suboptimal performance due to limited information sharing and local minima issues. End-to-end learning approaches streamline the pipeline by mapping sensory observations directly to actions but require large-scale datasets, face significant sim-to-real gaps, or lack dynamical feasibility. In this paper, we propose a self-supervised UAV trajectory planning pipeline that integrates a learning-based depth perception with differentiable trajectory optimization. A 3D cost map guides UAV behavior without expert demonstrations or human labels. Additionally, we incorporate a neural network-based time allocation strategy to improve the efficiency and optimality. The system thus combines robust learning-based perception with reliable physics-based optimization for improved generalizability and interpretability. Both simulation and real-world experiments validate our approach across various environments, demonstrating its effectiveness and robustness. Our method achieves a 31.33% improvement in position tracking error and 49.37% reduction in control effort compared to the state-of-the-art.
随着无人机(UAVs)在各种领域获得广泛应用,三维环境中的路径规划仍然是一个关键挑战,特别是在尺寸、重量和功率(SWAP)的约束下。传统的模块化规划系统由于信息共享有限和局部最小值问题,通常会引入延迟和性能不佳的情况。端到端的学习方法通过直接将感官观察映射到动作来优化流程,但需要大规模数据集,面临从模拟到现实的巨大差距,或缺乏动态可行性。在本文中,我们提出了一种无人机的自监督轨迹规划流程,该方法结合了基于学习的深度感知和可微分的轨迹优化。一个三维成本图在无需专家演示或人工标签的情况下引导无人机的行为。此外,我们采用基于神经网络的时间分配策略来提高效率和最优性。因此,该系统结合了强大的基于学习的感知和可靠的基于物理的优化,提高了通用性和可解释性。仿真和真实世界的实验验证了我们在各种环境下的方法,证明了其有效性和稳健性。与现有技术相比,我们的方法实现了定位跟踪误差提高31.33%,控制努力减少49.37%。
论文及项目相关链接
Summary
无人机在各个领域的应用日益广泛,但在三维环境中的路径规划仍是关键挑战。传统的模块化规划系统存在信息共享有限和局部最小值问题,导致延迟和性能不佳。本文提出了一种基于自监督的无人机轨迹规划管道,结合学习深度感知和可微轨迹优化。利用三维成本图引导无人机行为,无需专家演示或人工标签。结合神经网络的时间分配策略,提高效率和最优性。该系统集成稳健的学习感知和可靠的物理优化,提高通用性和可解释性。模拟和真实实验验证了在各种环境下的有效性。与现有技术相比,该方法提高了31.33%的定位跟踪误差和49.37%的控制效率。
Key Takeaways
- 无人机在三维环境中的路径规划面临关键挑战。
- 传统模块化规划系统存在信息共享有限和局部最小值问题。
- 自监督无人机轨迹规划管道结合了学习深度感知和可微轨迹优化。
- 三维成本图引导无人机行为,无需专家演示或人工标签。
- 神经网络的时间分配策略提高了效率和最优性。
- 该方法集成了学习感知和物理优化,增强了通用性和可解释性。
- 模拟和真实实验验证了方法在各种环境下的有效性。
点此查看论文截图