⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-04-26 更新
PPS-Ctrl: Controllable Sim-to-Real Translation for Colonoscopy Depth Estimation
Authors:Xinqi Xiong, Andrea Dunn Beltran, Jun Myeong Choi, Marc Niethammer, Roni Sengupta
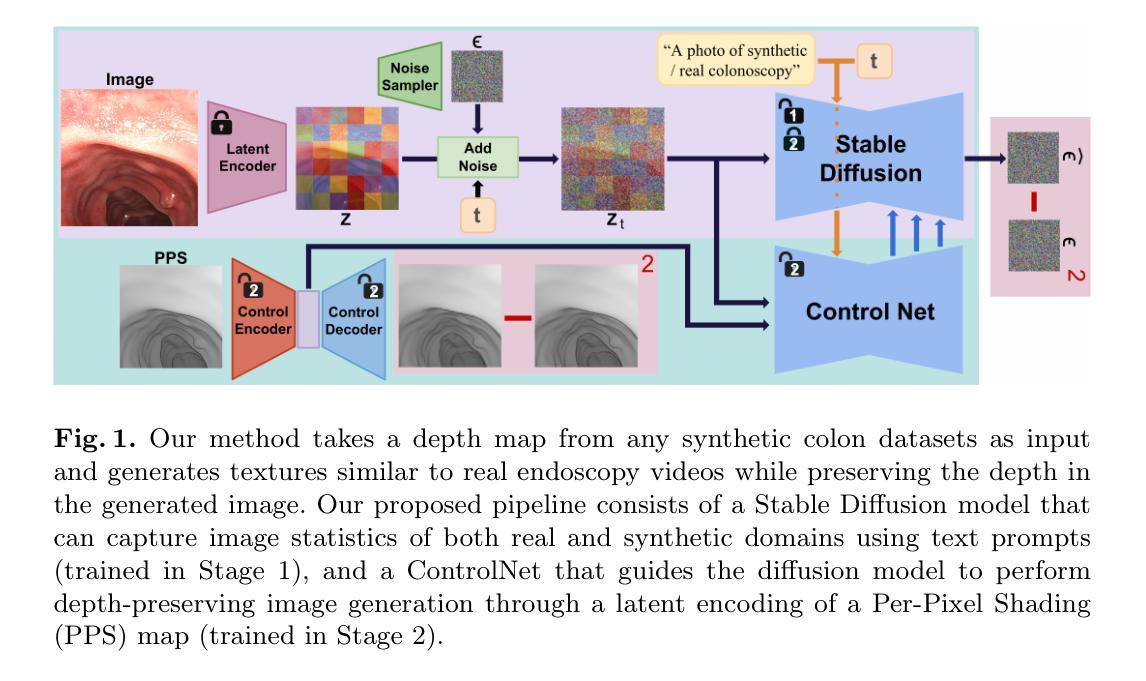
Accurate depth estimation enhances endoscopy navigation and diagnostics, but obtaining ground-truth depth in clinical settings is challenging. Synthetic datasets are often used for training, yet the domain gap limits generalization to real data. We propose a novel image-to-image translation framework that preserves structure while generating realistic textures from clinical data. Our key innovation integrates Stable Diffusion with ControlNet, conditioned on a latent representation extracted from a Per-Pixel Shading (PPS) map. PPS captures surface lighting effects, providing a stronger structural constraint than depth maps. Experiments show our approach produces more realistic translations and improves depth estimation over GAN-based MI-CycleGAN. Our code is publicly accessible at https://github.com/anaxqx/PPS-Ctrl.
精确的深度估计可以增强内窥镜导航和诊断,但在临床环境中获取真实深度信息是一项挑战。通常使用合成数据集进行训练,但领域差距限制了在实际数据上的泛化能力。我们提出了一种新型图像到图像的翻译框架,能够在保留结构的同时,利用临床数据生成逼真的纹理。我们的主要创新点在于结合了稳定扩散和控制网络(ControlNet),以像素阴影(PPS)映射中提取的潜在表示为条件。PPS捕捉表面光照效果,为深度图提供了更强的结构约束。实验表明,我们的方法能够产生更逼真的翻译效果,并且提高了基于GAN的MI-CycleGAN的深度估计效果。我们的代码公开在https://github.com/anaxqx/PPS-Ctrl上可访问。
论文及项目相关链接
Summary
本文提出了一种新型图像到图像转换框架,通过集成Stable Diffusion与ControlNet技术,结合从Per-Pixel Shading(PPS)地图中提取的潜在表征,用于生成具有真实纹理的临床数据。该方法解决了在深度估计中内镜导航和诊断的难题,并解决了合成数据集在实际应用中的领域差距问题。该方法的代码已公开。
Key Takeaways
- 深度估计在内镜导航和诊断中至关重要,但临床环境中获取真实深度数据具有挑战性。
- 合成数据集常用于训练,但存在领域差距,限制了在实际数据中的泛化能力。
- 提出的图像到图像转换框架结合了Stable Diffusion与ControlNet技术,能够生成具有真实纹理的临床数据。
- 该方法的关键创新在于利用Per-Pixel Shading(PPS)地图提取的结构信息,为图像生成提供更强大的结构约束。
- 实验表明,该方法产生的图像翻译更真实,提高了深度估计的精度。
- 与基于GAN的MI-CycleGAN相比,该方法具有更好的性能。
点此查看论文截图