⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-05-16 更新
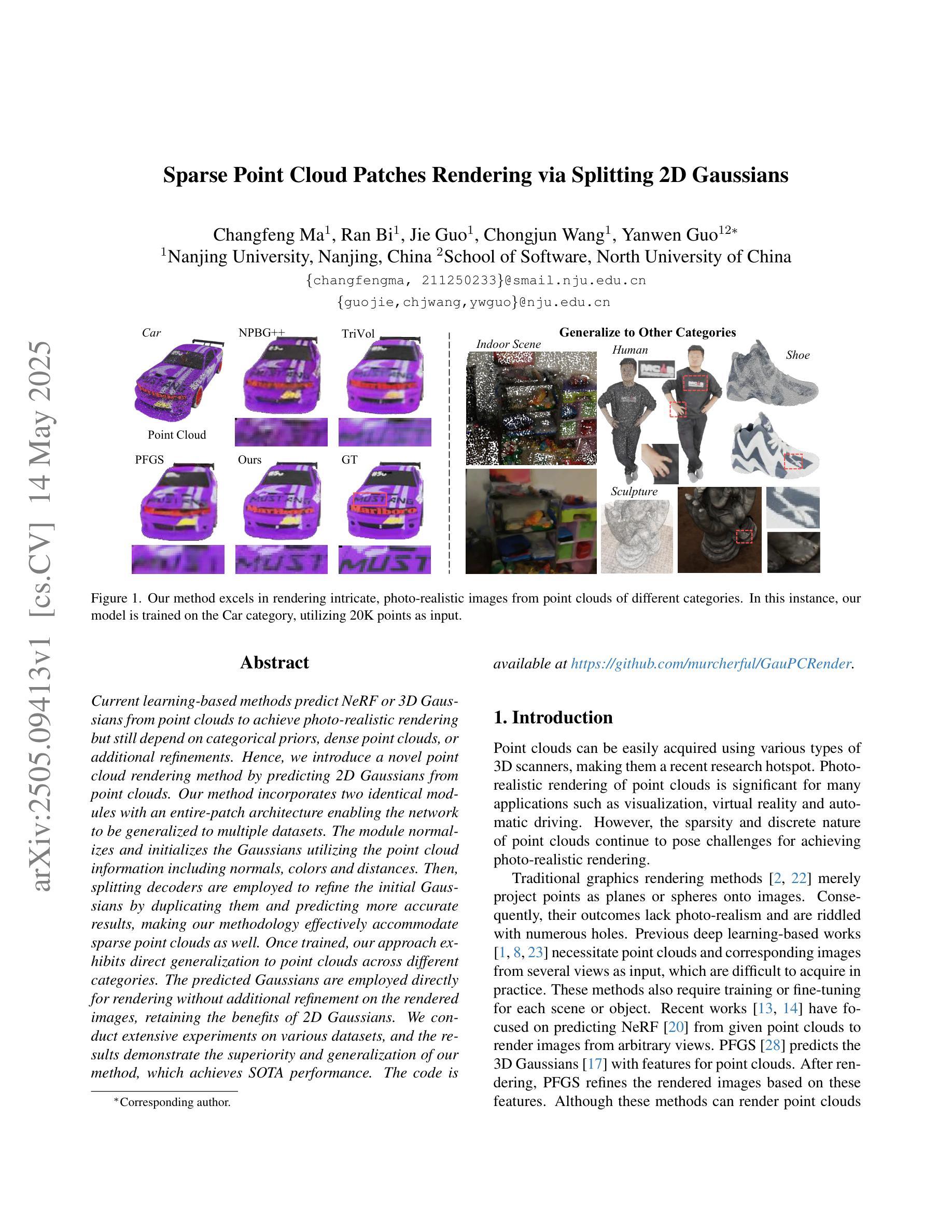
Sparse Point Cloud Patches Rendering via Splitting 2D Gaussians
Authors:Ma Changfeng, Bi Ran, Guo Jie, Wang Chongjun, Guo Yanwen
Current learning-based methods predict NeRF or 3D Gaussians from point clouds to achieve photo-realistic rendering but still depend on categorical priors, dense point clouds, or additional refinements. Hence, we introduce a novel point cloud rendering method by predicting 2D Gaussians from point clouds. Our method incorporates two identical modules with an entire-patch architecture enabling the network to be generalized to multiple datasets. The module normalizes and initializes the Gaussians utilizing the point cloud information including normals, colors and distances. Then, splitting decoders are employed to refine the initial Gaussians by duplicating them and predicting more accurate results, making our methodology effectively accommodate sparse point clouds as well. Once trained, our approach exhibits direct generalization to point clouds across different categories. The predicted Gaussians are employed directly for rendering without additional refinement on the rendered images, retaining the benefits of 2D Gaussians. We conduct extensive experiments on various datasets, and the results demonstrate the superiority and generalization of our method, which achieves SOTA performance. The code is available at https://github.com/murcherful/GauPCRender}{https://github.com/murcherful/GauPCRender.
当前基于学习的方法通过点云预测NeRF或3D高斯来实现逼真的渲染,但它们仍然依赖于类别先验、密集点云或额外的细化步骤。因此,我们引入了一种新的点云渲染方法,该方法通过点云预测2D高斯。我们的方法采用两个相同的模块,并使用整个补丁架构,使网络能够推广到多个数据集。该模块使用点云信息(包括法线、颜色和距离)对高斯进行归一化和初始化。然后,采用分割解码器通过复制高斯并对其进行细化,预测更准确的结果,这使得我们的方法能够有效地适应稀疏点云。一旦训练完成,我们的方法就能在不同的类别点云上实现直接的通用性。预测的高斯被直接用于渲染,而无需在渲染的图像上进行额外的细化,保留了2D高斯的优势。我们在各种数据集上进行了广泛的实验,结果表明我们的方法具有优越性和通用性,达到了最先进的性能。代码可在https://github.com/murcherful/GauPCRender处获取。
论文及项目相关链接
PDF CVPR 2025 Accepted
Summary
预测点云NeRF或3D高斯模型的现有学习方法依赖于分类先验、密集点云或额外优化。本文提出一种新颖的点云渲染方法,通过预测点云的二维高斯模型进行渲染。该方法采用两个相同模块,采用全块架构,使网络能够推广到多个数据集。该方法利用点云信息(包括法线、颜色和距离)对高斯模型进行归一化和初始化,并使用分离解码器对初始高斯模型进行细化,使其适应稀疏点云。训练后,该方法可直接应用于不同类别的点云。预测的高斯模型直接用于渲染,无需对渲染图像进行额外优化,保留了二维高斯模型的优点。实验结果表明,该方法具有优越性和泛化能力,实现了最先进的性能。
Key Takeaways
- 提出一种新颖的点云渲染方法,通过预测二维高斯模型进行渲染,不依赖于分类先验、密集点云或额外优化。
- 采用全块架构的两个相同模块,使网络能够推广到多个数据集。
- 利用点云信息(法线、颜色和距离)对高斯模型进行归一化和初始化。
- 使用分离解码器对初始高斯模型进行细化,使其适应稀疏点云。
- 训练后的方法可直接应用于不同类别的点云。
- 预测的高斯模型直接用于渲染,无需额外优化,保留了二维高斯模型的优点。
点此查看论文截图