⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-09-09 更新
BayesSDF: Surface-Based Laplacian Uncertainty Estimation for 3D Geometry with Neural Signed Distance Fields
Authors:Rushil Desai
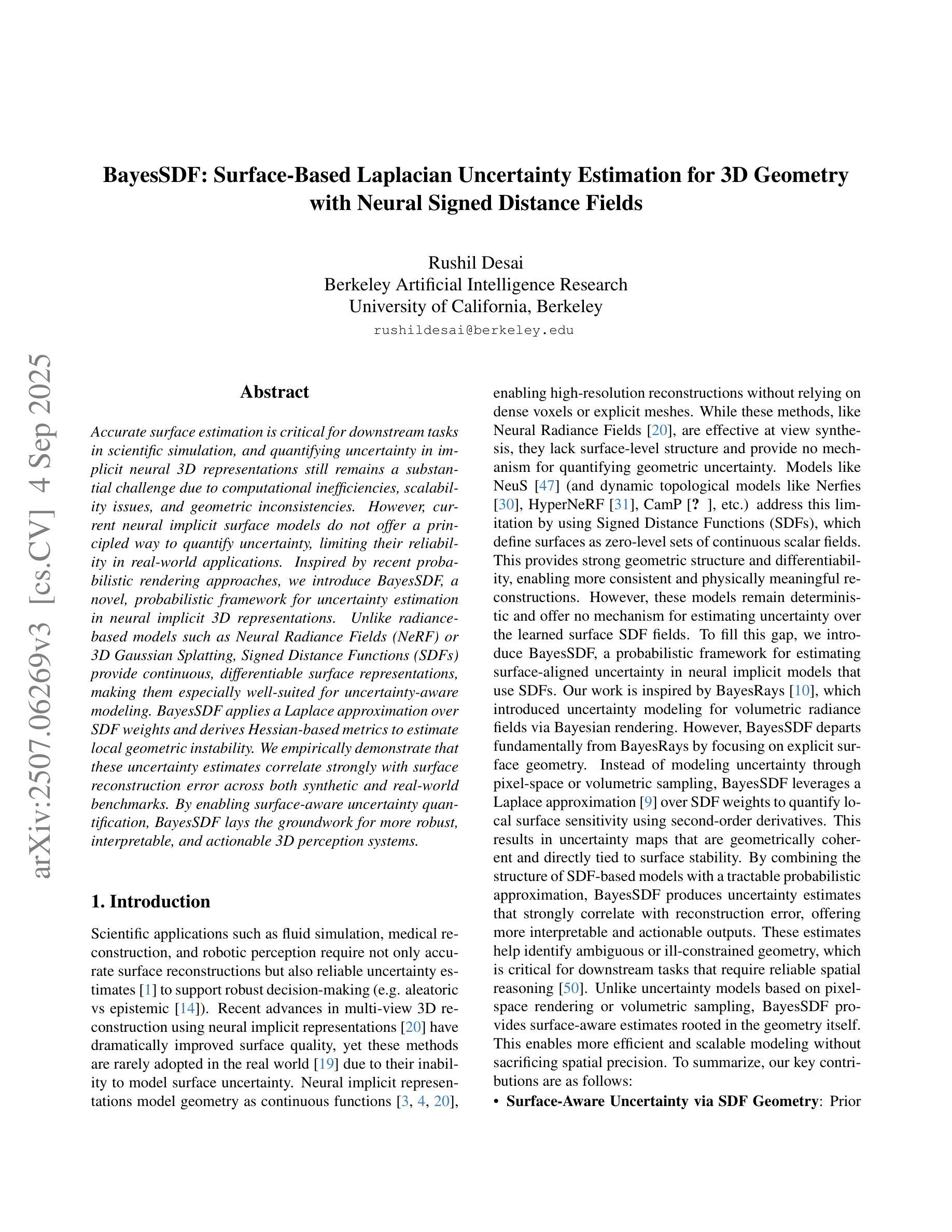
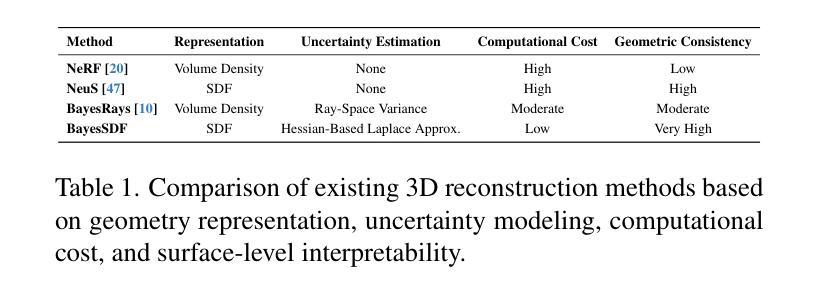
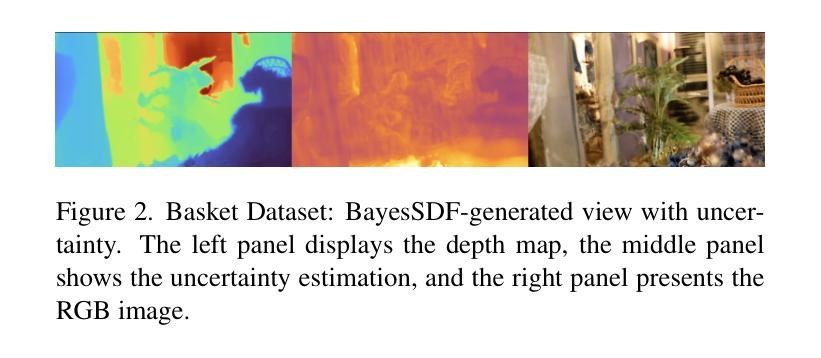
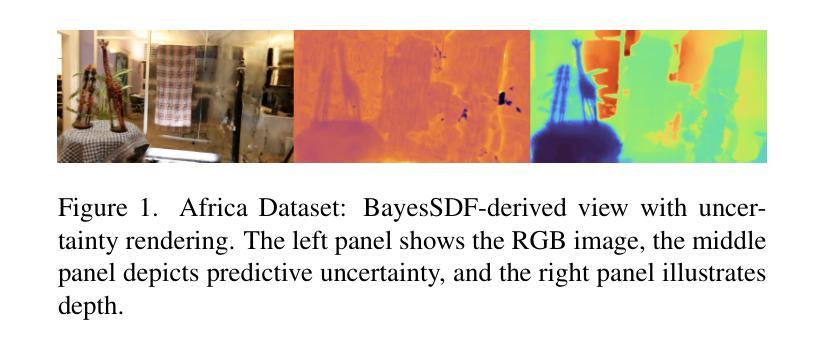
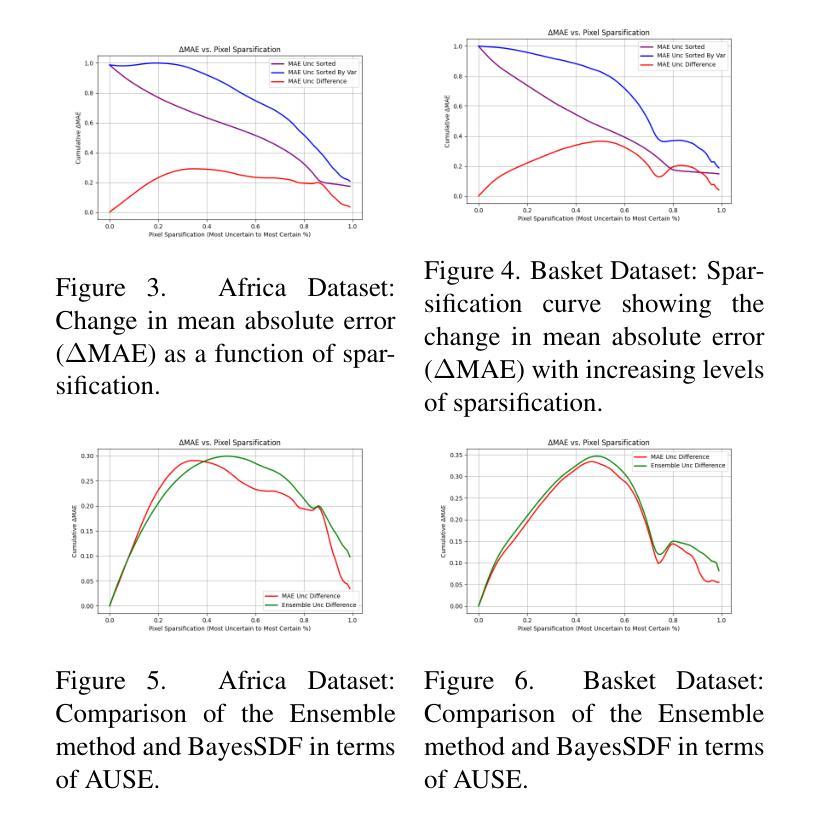
Accurate surface estimation is critical for downstream tasks in scientific simulation, and quantifying uncertainty in implicit neural 3D representations still remains a substantial challenge due to computational inefficiencies, scalability issues, and geometric inconsistencies. However, current neural implicit surface models do not offer a principled way to quantify uncertainty, limiting their reliability in real-world applications. Inspired by recent probabilistic rendering approaches, we introduce BayesSDF, a novel probabilistic framework for uncertainty estimation in neural implicit 3D representations. Unlike radiance-based models such as Neural Radiance Fields (NeRF) or 3D Gaussian Splatting, Signed Distance Functions (SDFs) provide continuous, differentiable surface representations, making them especially well-suited for uncertainty-aware modeling. BayesSDF applies a Laplace approximation over SDF weights and derives Hessian-based metrics to estimate local geometric instability. We empirically demonstrate that these uncertainty estimates correlate strongly with surface reconstruction error across both synthetic and real-world benchmarks. By enabling surface-aware uncertainty quantification, BayesSDF lays the groundwork for more robust, interpretable, and actionable 3D perception systems.
精确的表面估计是科学模拟中下游任务的关键,而在隐式神经三维表示中量化不确定性仍然是一个巨大的挑战,主要是由于计算效率低下、可扩展性问题以及几何不一致性。然而,当前的神经隐式表面模型并没有提供一种原则性的方法来量化不确定性,这限制了它们在现实世界应用中的可靠性。受最近概率渲染方法的启发,我们引入了BayesSDF,这是一种用于神经隐式三维表示中不确定性估计的新型概率框架。与基于辐射的模型(如神经辐射场或三维高斯喷涂)不同,符号距离函数(SDFs)提供了连续、可微分的表面表示,使其特别适合进行感知不确定性的建模。BayesSDF对SDF权重应用拉普拉斯近似,并推导基于Hessian的度量来估计局部几何不稳定性。我们通过实证证明,这些不确定性估计与合成和真实世界的基准测试中的表面重建误差强烈相关。通过实现表面感知的不确定性量化,BayesSDF为更稳健、可解释和可操作的3D感知系统奠定了基础。
论文及项目相关链接
PDF ICCV 2025 Workshops (11 Pages, 6 Figures, 2 Tables)
Summary
本文提出一种名为BayesSDF的新型概率框架,用于神经隐式三维表示中的不确定性估计。通过应用Laplace近似于SDF权重并计算Hessian基度量来估算局部几何不稳定性,BayesSDF能够提供表面感知的不确定性量化,从而为实现更稳健、可解释和操作的三维感知系统奠定基础。
Key Takeaways
- 当前神经隐式表面模型缺乏量化不确定性的有效方法,限制了其在真实世界应用中的可靠性。
- BayesSDF是一种新型概率框架,旨在解决神经隐式三维表示中的不确定性估计问题。
- Signed Distance Functions(SDFs)为连续、可微分的表面表示,非常适合进行不确定性感知建模。
- BayesSDF使用Laplace近似对SDF权重进行处理,并通过Hessian基度量估算局部几何不稳定性。
- 该方法能够在合成和真实世界基准测试中提供与表面重建误差强烈相关的不确定性估计。
- BayesSDF为实现更稳健、可解释和操作的三维感知系统提供了基础。
点此查看论文截图
ActiveGAMER: Active GAussian Mapping through Efficient Rendering
Authors:Liyan Chen, Huangying Zhan, Kevin Chen, Xiangyu Xu, Qingan Yan, Changjiang Cai, Yi Xu
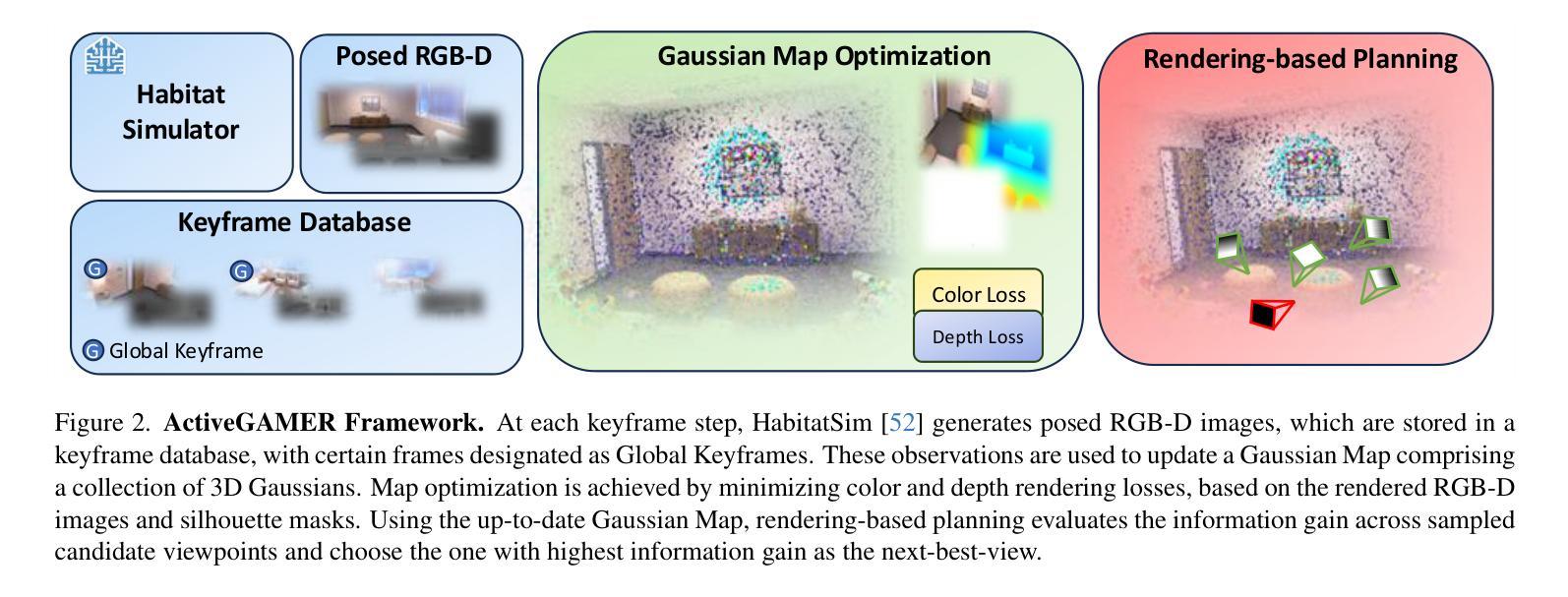
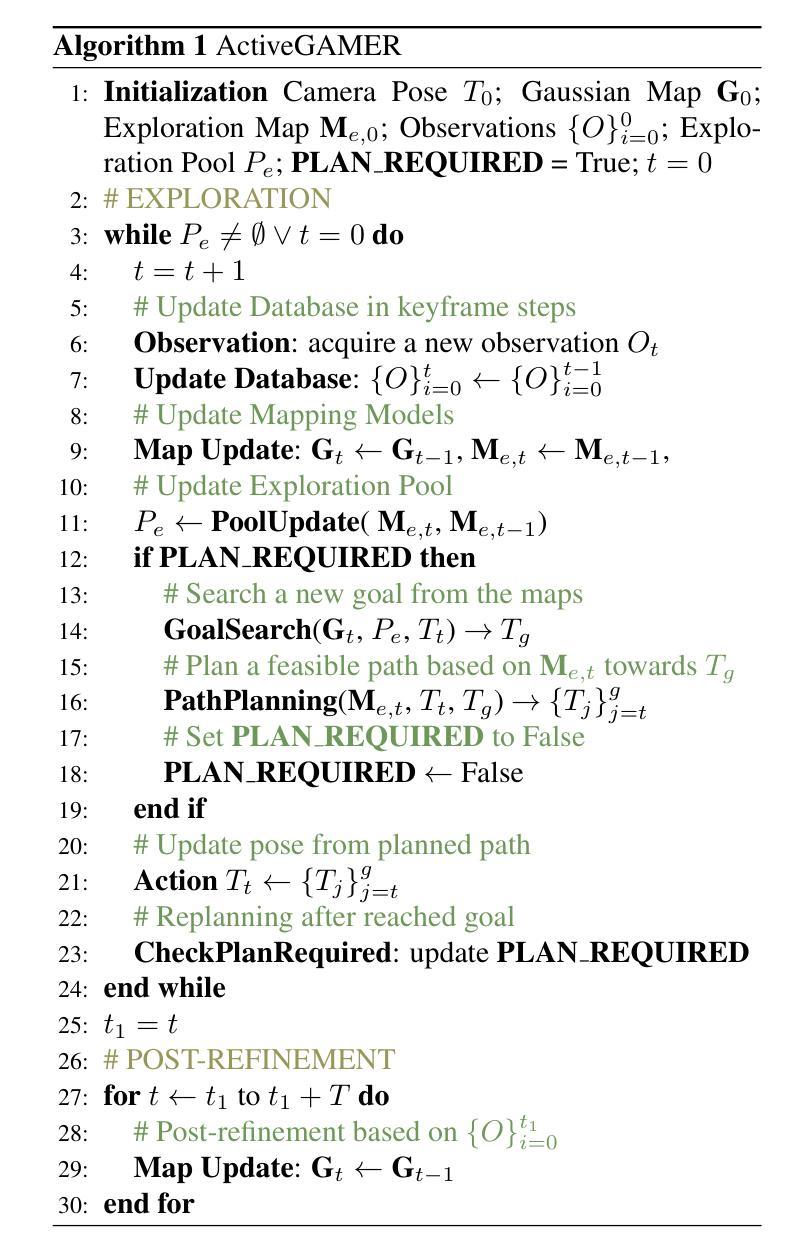
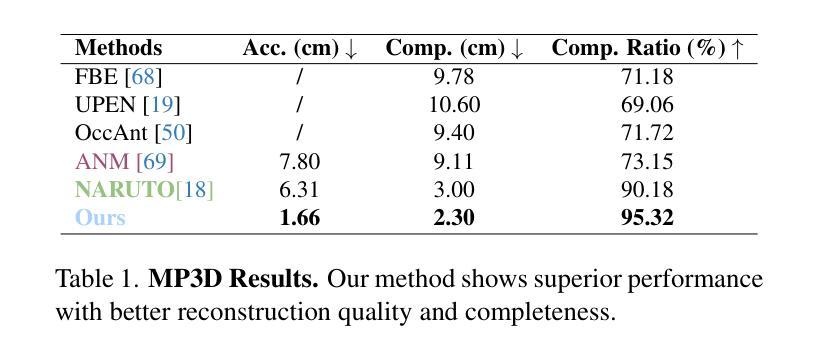
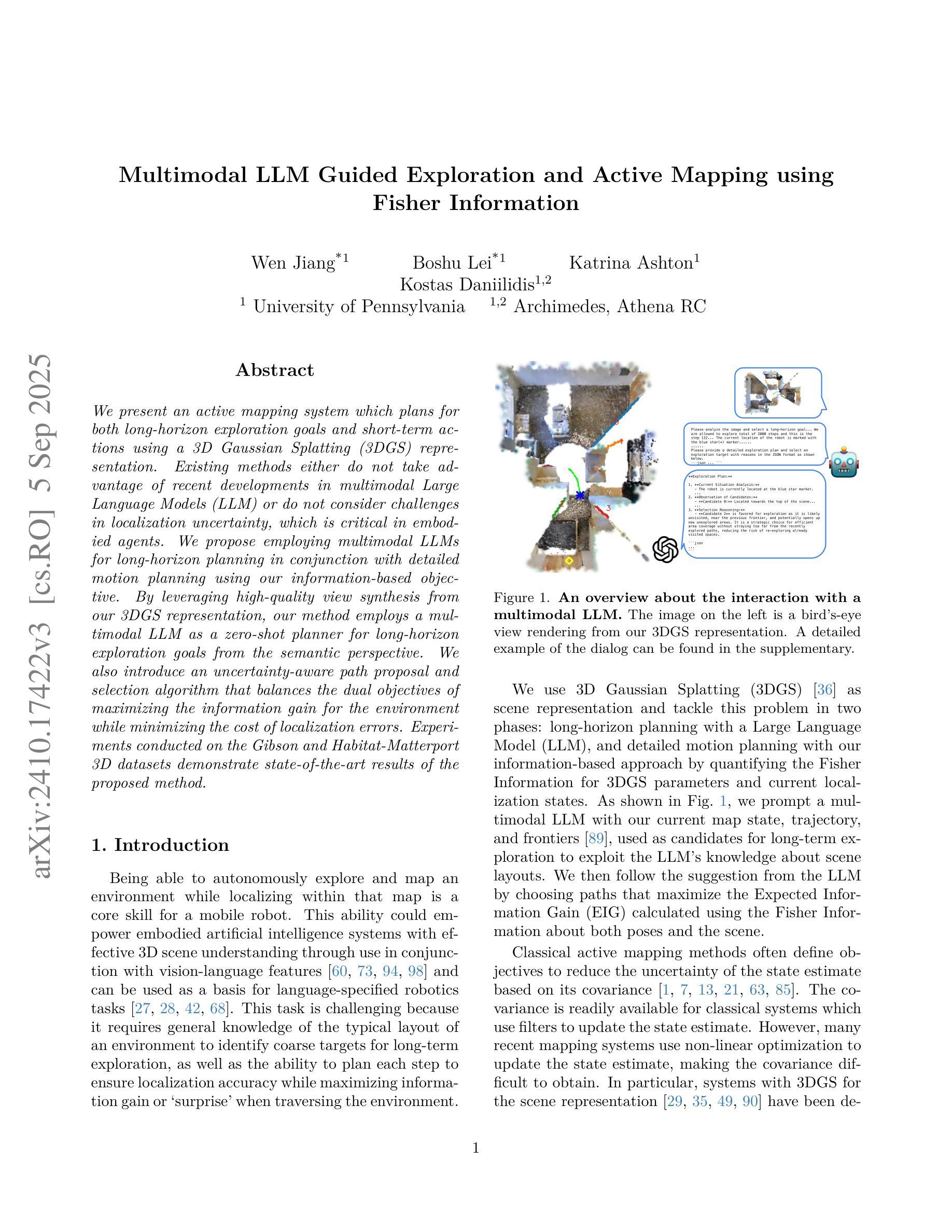
We introduce ActiveGAMER, an active mapping system that utilizes 3D Gaussian Splatting (3DGS) to achieve high-quality, real-time scene mapping and exploration. Unlike traditional NeRF-based methods, which are computationally demanding and restrict active mapping performance, our approach leverages the efficient rendering capabilities of 3DGS, allowing effective and efficient exploration in complex environments. The core of our system is a rendering-based information gain module that dynamically identifies the most informative viewpoints for next-best-view planning, enhancing both geometric and photometric reconstruction accuracy. ActiveGAMER also integrates a carefully balanced framework, combining coarse-to-fine exploration, post-refinement, and a global-local keyframe selection strategy to maximize reconstruction completeness and fidelity. Our system autonomously explores and reconstructs environments with state-of-the-art geometric and photometric accuracy and completeness, significantly surpassing existing approaches in both aspects. Extensive evaluations on benchmark datasets such as Replica and MP3D highlight ActiveGAMER’s effectiveness in active mapping tasks.
我们介绍了ActiveGAMER,这是一个利用3D高斯拼接(3DGS)技术的主动映射系统,可实现高质量、实时场景映射和探索。与传统的基于NeRF的方法不同,这些方法计算量大,限制了主动映射的性能,我们的方法利用3DGS的高效渲染能力,能够在复杂环境中实现有效且高效的探索。我们的系统的核心是基于渲染的信息增益模块,该模块能够动态识别最具信息量的观点来进行下一次最佳视角规划,提高几何和光度重建的准确性。ActiveGAMER还整合了一个精心设计的框架,结合了由粗到细的探索、后期优化以及全局局部关键帧选择策略,以最大化重建的完整性和逼真度。我们的系统以最先进的几何和光度准确性和完整性自主探索和重建环境,在诸如Replica和MP3D等基准数据集上的广泛评估凸显了ActiveGAMER在主动映射任务中的有效性。
论文及项目相关链接
PDF Accepted to CVPR2025. Project page: https://oppo-us-research.github.io/ActiveGAMER-website/. Code: https://github.com/oppo-us-research/ActiveGAMER
Summary
在ActiveGAMER系统中,利用3D高斯喷射技术实现了高质量、实时的场景映射和探测。区别于计算量大且限制主动映射性能的传统NeRF方法,ActiveGAMER采用高效的渲染能力,实现在复杂环境中的有效且高效探测。其核心是一个基于渲染的信息增益模块,动态识别最具信息量的视角进行下一步最佳视角规划,提高几何和光度重建的准确性。ActiveGAMER结合了从粗到细的探测策略、后处理优化以及全局局部关键帧选择策略,以求最大化重建的完整性和保真度。系统能够自主探测和重建环境,在几何和光度精确度和完整性方面达到了业界领先水平,显著超越了现有方法在主动映射任务上的表现。
Key Takeaways
- ActiveGAMER利用3D高斯喷射技术实现高效渲染。
- 与传统NeRF方法不同,ActiveGAMER具有更高的计算效率和实时性能。
- 基于渲染的信息增益模块动态识别最具信息量的视角。
- ActiveGAMER采用多种策略以提高重建的完整性和准确性。
- 系统能够在复杂环境中有效进行自主探测和重建。
- 在几何和光度精确度和完整性方面达到了业界领先水平。
点此查看论文截图