⚠️ 以下所有内容总结都来自于 大语言模型的能力,如有错误,仅供参考,谨慎使用
🔴 请注意:千万不要用于严肃的学术场景,只能用于论文阅读前的初筛!
💗 如果您觉得我们的项目对您有帮助 ChatPaperFree ,还请您给我们一些鼓励!⭐️ HuggingFace免费体验
2025-09-10 更新
Real-time Photorealistic Mapping for Situational Awareness in Robot Teleoperation
Authors:Ian Page, Pierre Susbielle, Olivier Aycard, Pierre-Brice Wieber
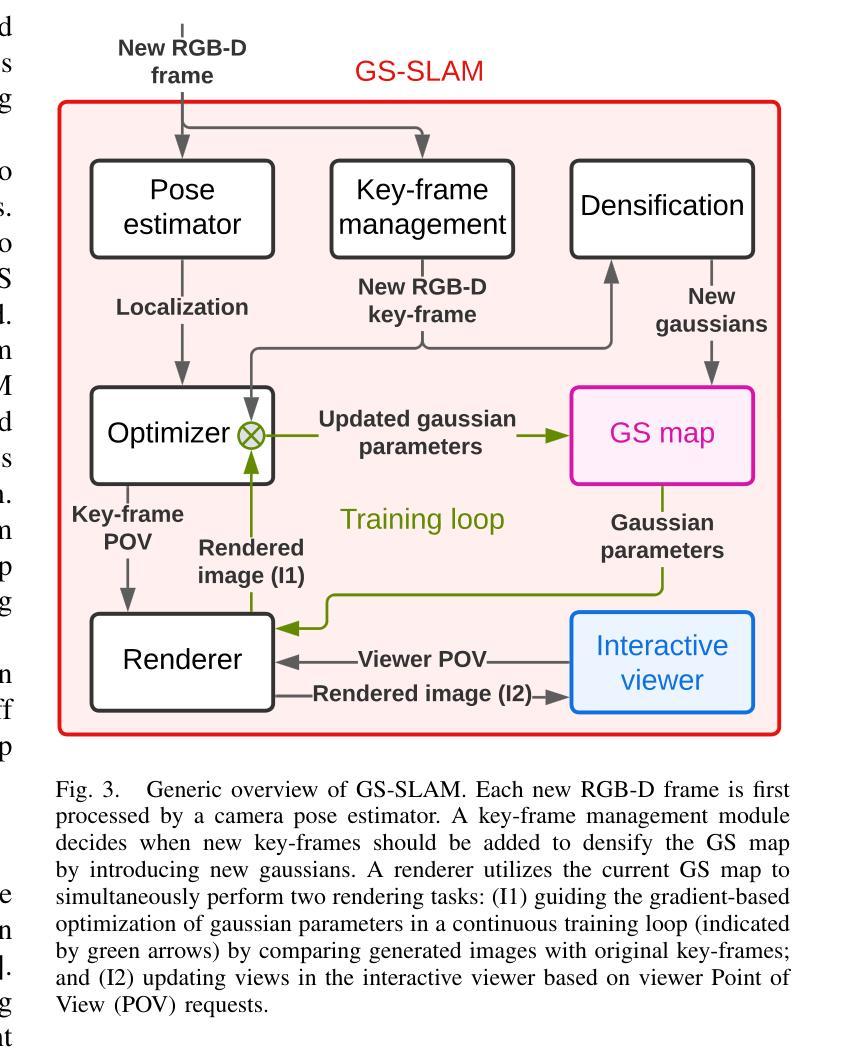
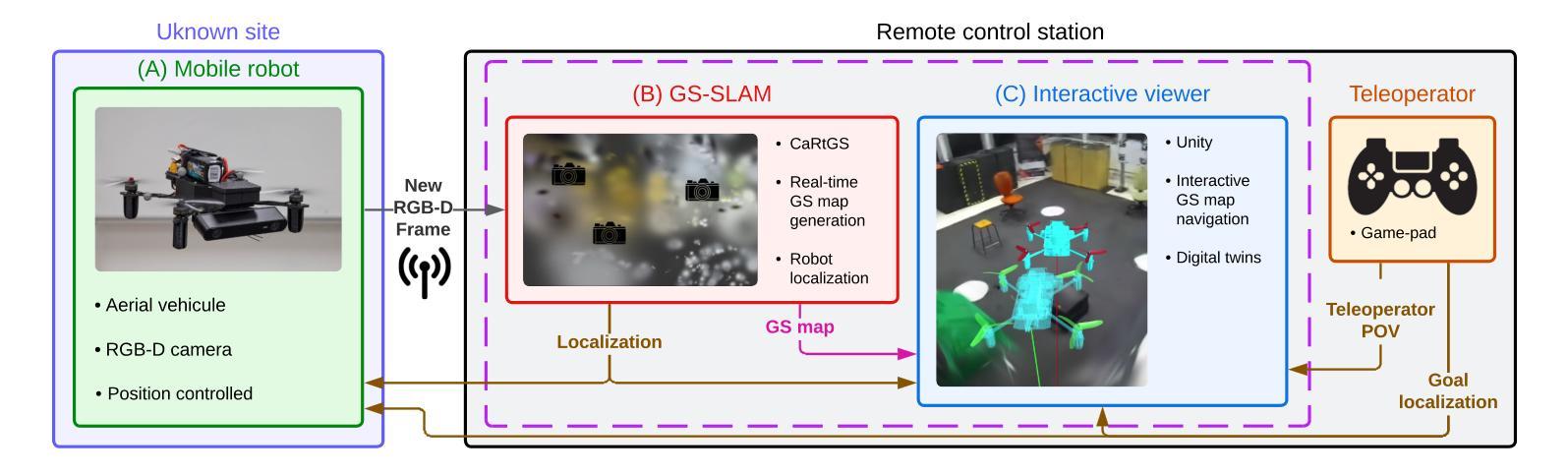
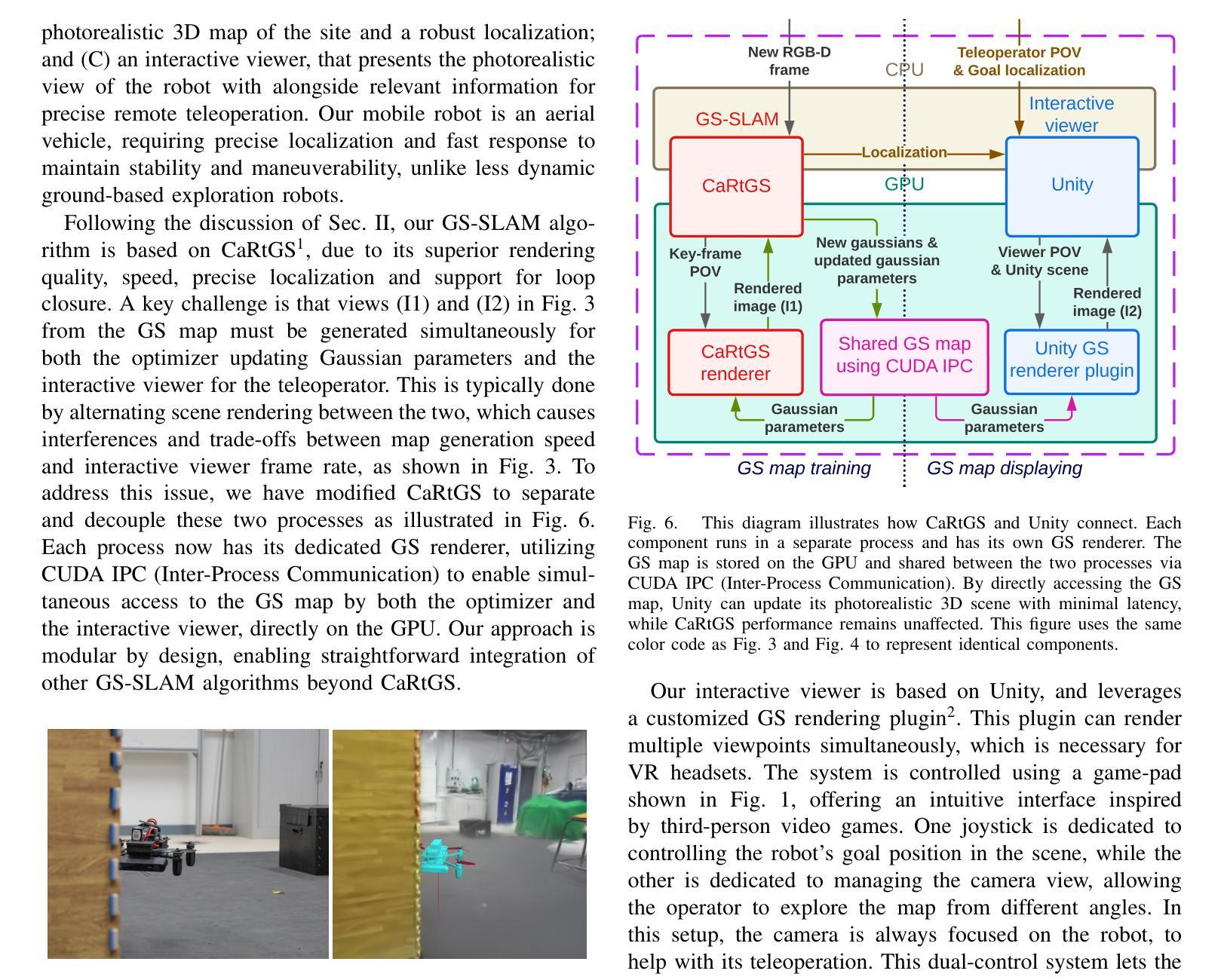
Achieving efficient remote teleoperation is particularly challenging in unknown environments, as the teleoperator must rapidly build an understanding of the site’s layout. Online 3D mapping is a proven strategy to tackle this challenge, as it enables the teleoperator to progressively explore the site from multiple perspectives. However, traditional online map-based teleoperation systems struggle to generate visually accurate 3D maps in real-time due to the high computational cost involved, leading to poor teleoperation performances. In this work, we propose a solution to improve teleoperation efficiency in unknown environments. Our approach proposes a novel, modular and efficient GPU-based integration between recent advancement in gaussian splatting SLAM and existing online map-based teleoperation systems. We compare the proposed solution against state-of-the-art teleoperation systems and validate its performances through real-world experiments using an aerial vehicle. The results show significant improvements in decision-making speed and more accurate interaction with the environment, leading to greater teleoperation efficiency. In doing so, our system enhances remote teleoperation by seamlessly integrating photorealistic mapping generation with real-time performances, enabling effective teleoperation in unfamiliar environments.
在实现未知环境的远程遥控操作时,达到高效率是一项特别具有挑战性的任务,因为遥控操作员必须快速了解站点的布局。在线三维地图是一个经过验证的策略,用于应对这一挑战,因为它能让遥控操作员从多个角度逐步探索站点。然而,传统的基于在线地图的遥控系统由于计算成本高昂,难以在实时生成视觉准确的三维地图,从而导致遥控操作性能不佳。在这项工作中,我们提出了一种提高未知环境中遥控操作效率的解决方案。我们的方法提出了一种新颖、模块化且高效的基于GPU的集成方案,该方案结合了高斯绘制技术SLAM的最新进展和现有的基于在线地图的遥控系统。我们将所提解决方案与最先进的遥控操作系统进行了比较,并通过使用航空器的真实世界实验验证了其性能。结果表明,在决策制定速度和环境交互准确性方面取得了显著改进,从而提高了遥控操作效率。通过无缝集成逼真的地图生成与实时性能,我们的系统增强了远程遥控操作,使操作员能够在不熟悉的环境中实现有效的遥控操作。
论文及项目相关链接
Summary
在未知环境中实现高效的远程遥控操作具有挑战性,需要快速理解现场布局。在线三维地图是一种有效的策略,可逐步从多个角度探索现场。然而,传统的在线地图遥操作系统在实时生成视觉准确的三维地图方面存在困难,导致遥操作性能不佳。本研究提出了一种改进遥操作效率的解决方案,通过高斯溅面SLAM的最新进展与现有在线地图遥操作系统之间的模块化高效GPU集成。对比先进遥操作系统进行验证,并通过使用航空器的真实世界实验证明其性能。结果显示决策速度显著提高,与环境的交互更准确,从而提高遥操作效率。本系统通过无缝集成逼真的地图生成与实时性能,增强了远程遥控操作在陌生环境中的有效性。
Key Takeaways
- 在未知环境中实现高效远程遥控操作需快速理解现场布局。
- 在线三维地图能够帮助遥操作人员从不同角度逐步探索现场。
- 传统在线地图遥操作系统在实时生成视觉准确的三维地图方面存在困难。
- 本研究提出了一种解决方案,通过高斯溅面SLAM与在线地图遥操作系统集成,提高遥操作效率。
- 该解决方案在真实世界实验中表现出显著提高的决策速度和与环境的交互准确性。
- 所提出的系统无缝集成了地图生成和实时性能,提高了远程遥控操作的效率。
点此查看论文截图


Reconstruction and Reenactment Separated Method for Realistic Gaussian Head
Authors:Zhiling Ye, Cong Zhou, Xiubao Zhang, Haifeng Shen, Weihong Deng, Quan Lu
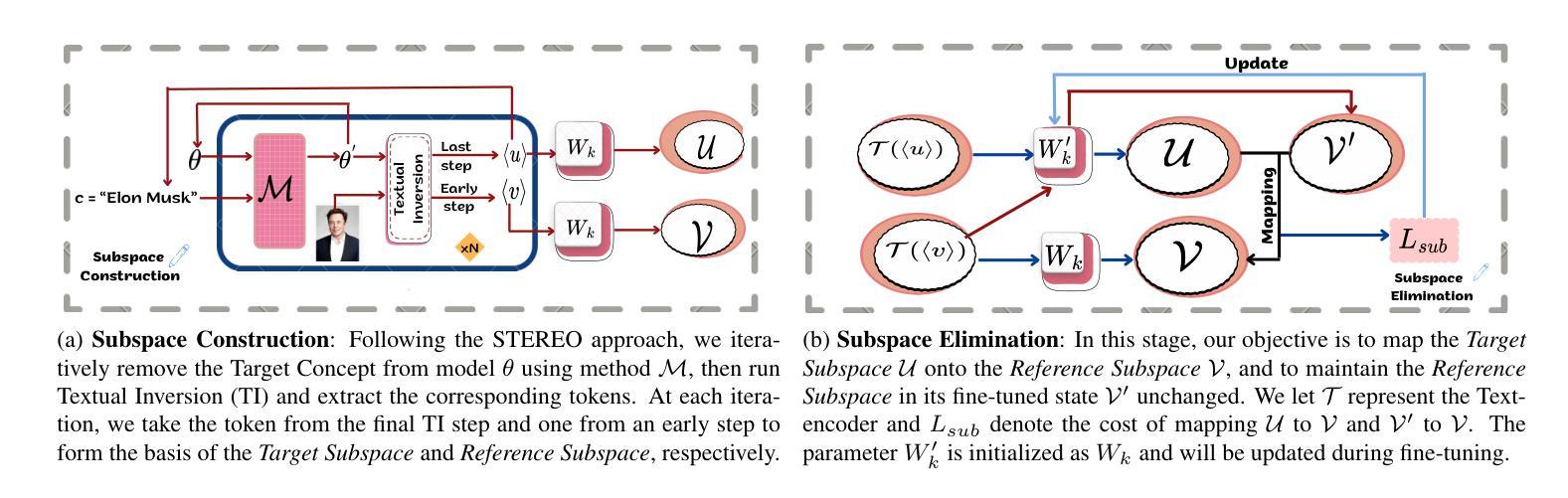
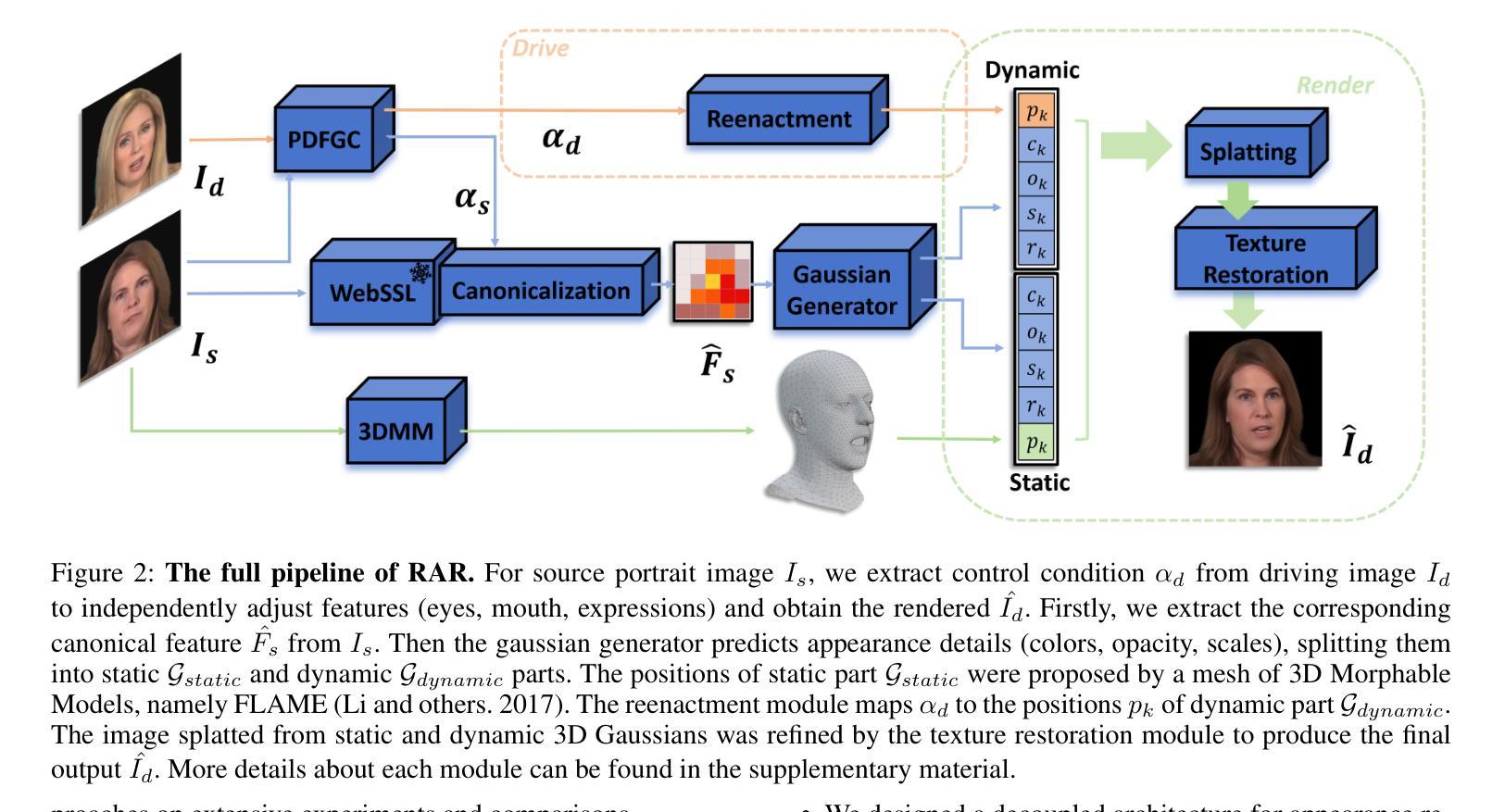
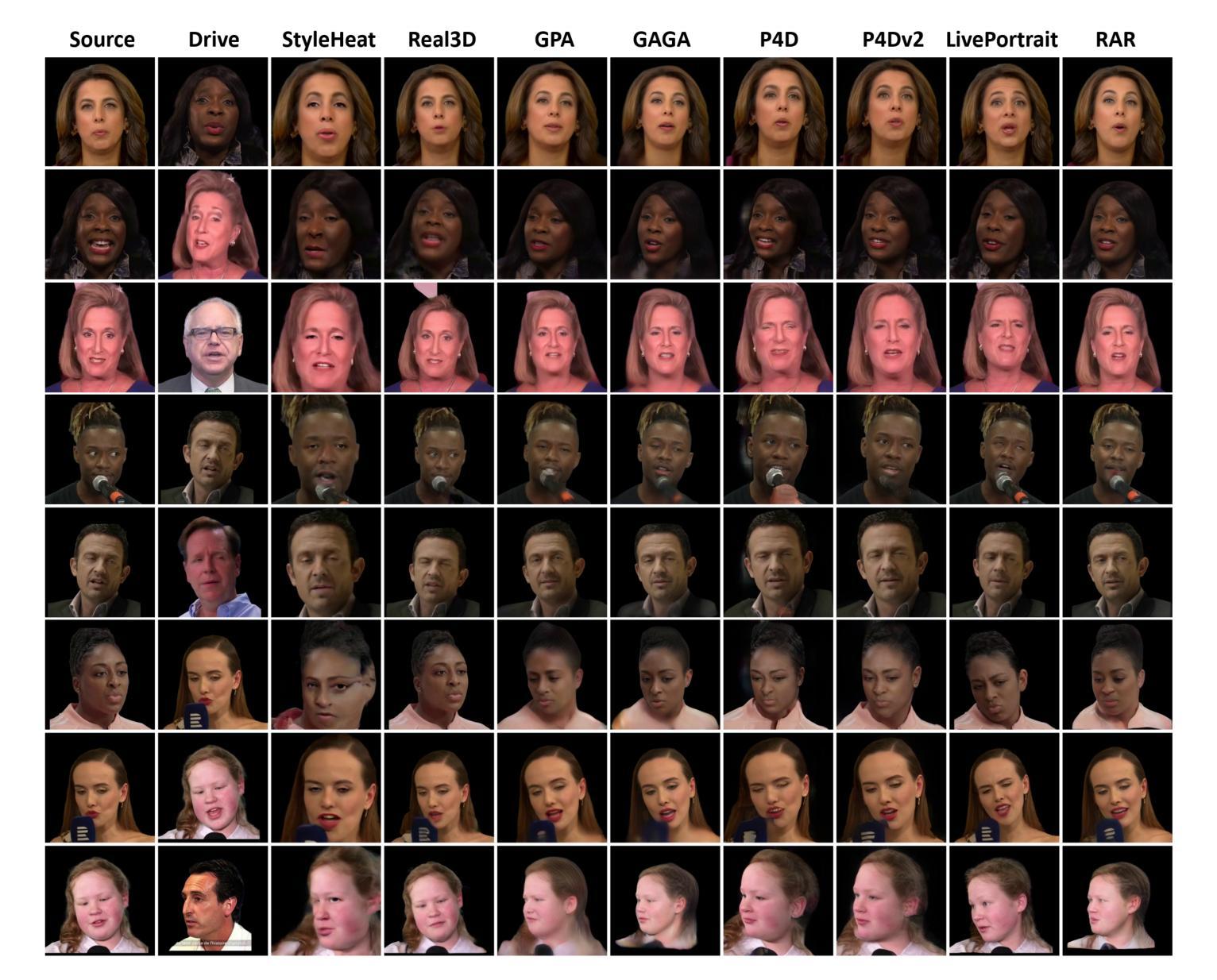
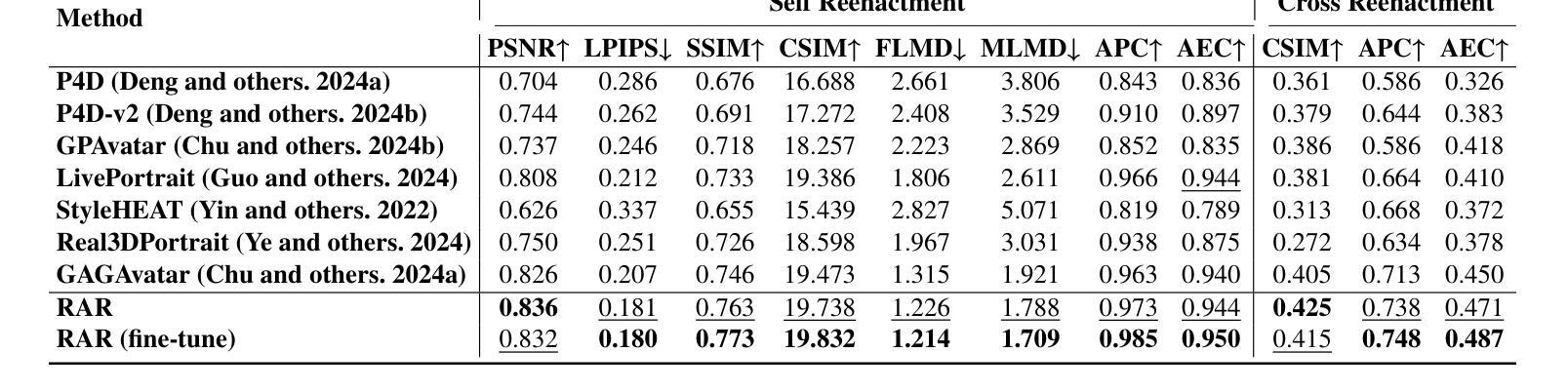
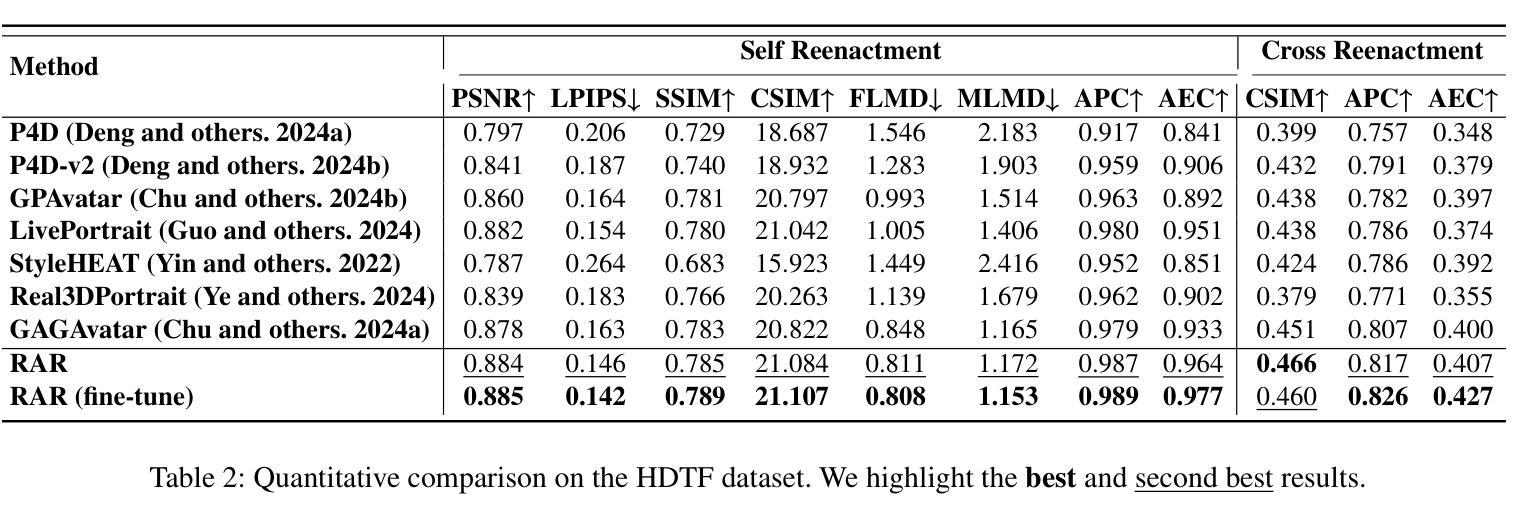
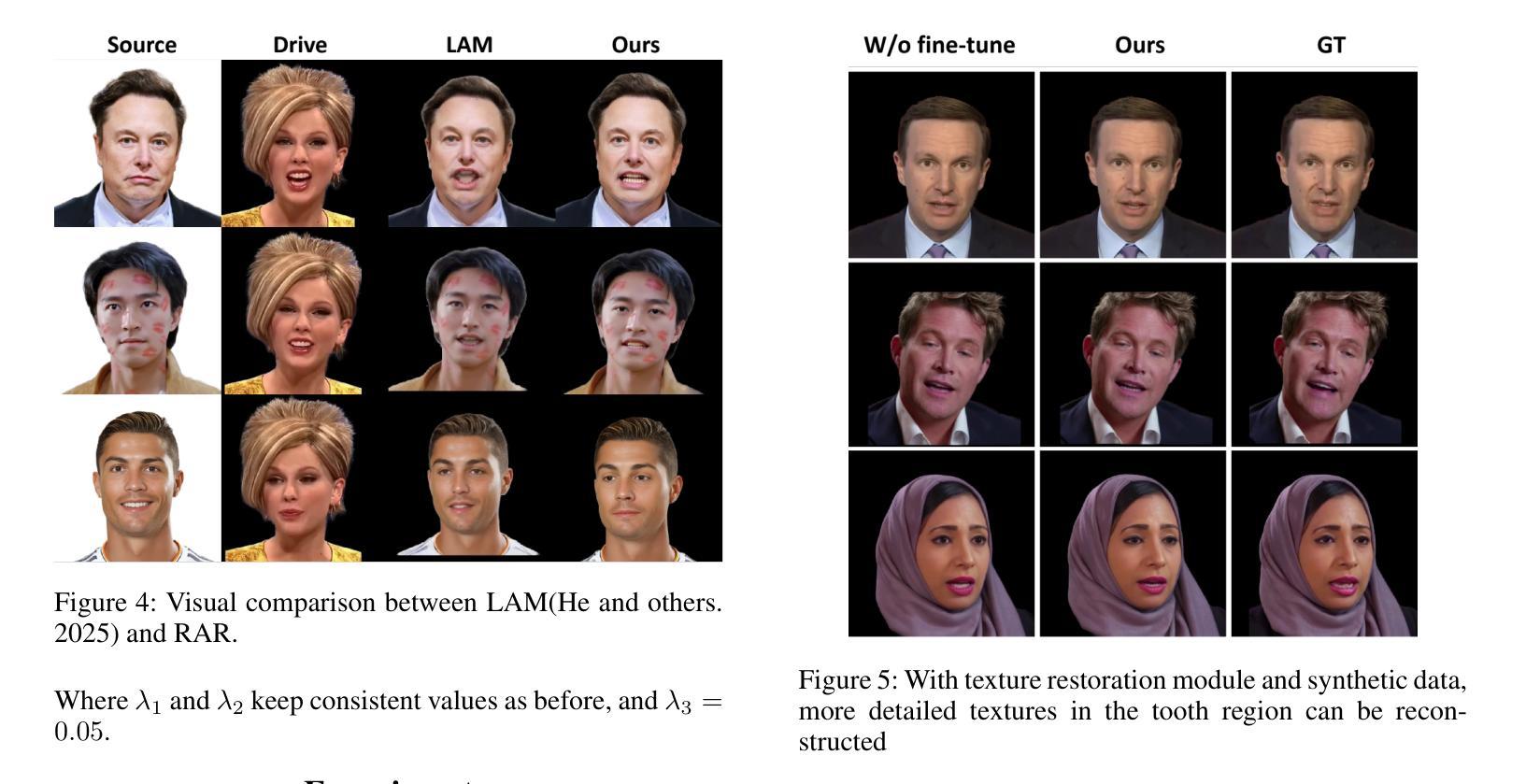
In this paper, we explore a reconstruction and reenactment separated framework for 3D Gaussians head, which requires only a single portrait image as input to generate controllable avatar. Specifically, we developed a large-scale one-shot gaussian head generator built upon WebSSL and employed a two-stage training approach that significantly enhances the capabilities of generalization and high-frequency texture reconstruction. During inference, an ultra-lightweight gaussian avatar driven by control signals enables high frame-rate rendering, achieving 90 FPS at a resolution of 512x512. We further demonstrate that the proposed framework follows the scaling law, whereby increasing the parameter scale of the reconstruction module leads to improved performance. Moreover, thanks to the separation design, driving efficiency remains unaffected. Finally, extensive quantitative and qualitative experiments validate that our approach outperforms current state-of-the-art methods.
在这篇论文中,我们探索了一个针对3D高斯头像的重建和重演分离框架,该框架只需要一个肖像图像作为输入来生成可控化身。具体来说,我们基于WebSSL开发了一个大规模的单次高斯头像生成器,并采用了一种两阶段训练方法,这显著提高了推广和高频纹理重建的能力。在推理过程中,一个由控制信号驱动的超轻量级高斯化身能够以高帧率进行渲染,在512x512的分辨率下达到90 FPS。我们还证明,所提出的框架遵循规模定律,即重建模块的参数规模增加会导致性能提高。此外,得益于分离设计,驱动效率不受影响。最后,大量的定量和定性实验验证了我们的方法优于当前最先进的方法。
论文及项目相关链接
Summary
本文提出了一种针对3D高斯头像的重建和复现分离框架,只需单张肖像照片作为输入即可生成可控虚拟形象。研究团队基于WebSSL开发了大规模的一次性高斯头像生成器,并采用两阶段训练方法,显著提高了模型的通用性和高频纹理重建能力。此外,该研究还实现了超轻量级的高斯虚拟形象控制信号驱动,支持高帧率渲染,达到512x512分辨率下的90 FPS。实验证明,该框架遵循扩展律,重建模块参数规模的增加可提高性能,且驱动效率不受影响。总体而言,本文方法优于现有先进技术。
Key Takeaways
- 提出了针对3D高斯头像的重建和复现分离框架,使用单张肖像照片生成可控虚拟形象。
- 基于WebSSL开发大规模一次性高斯头像生成器。
- 采用两阶段训练方法,提高模型的通用性和高频纹理重建能力。
- 实现超轻量级的高斯虚拟形象控制信号驱动,支持高帧率渲染。
- 框架遵循扩展律,重建模块参数规模增加可提高性能。
- 驱动效率在扩展中不受影响。
点此查看论文截图

ComplicitSplat: Downstream Models are Vulnerable to Blackbox Attacks by 3D Gaussian Splat Camouflages
Authors:Matthew Hull, Haoyang Yang, Pratham Mehta, Mansi Phute, Aeree Cho, Haorang Wang, Matthew Lau, Wenke Lee, Wilian Lunardi, Martin Andreoni, Duen Horng Chau
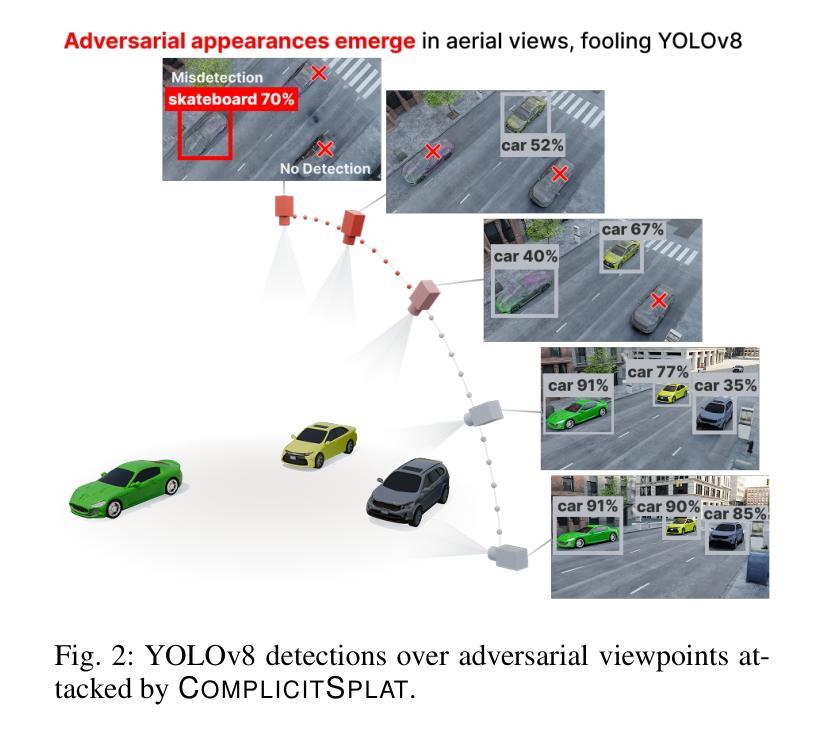
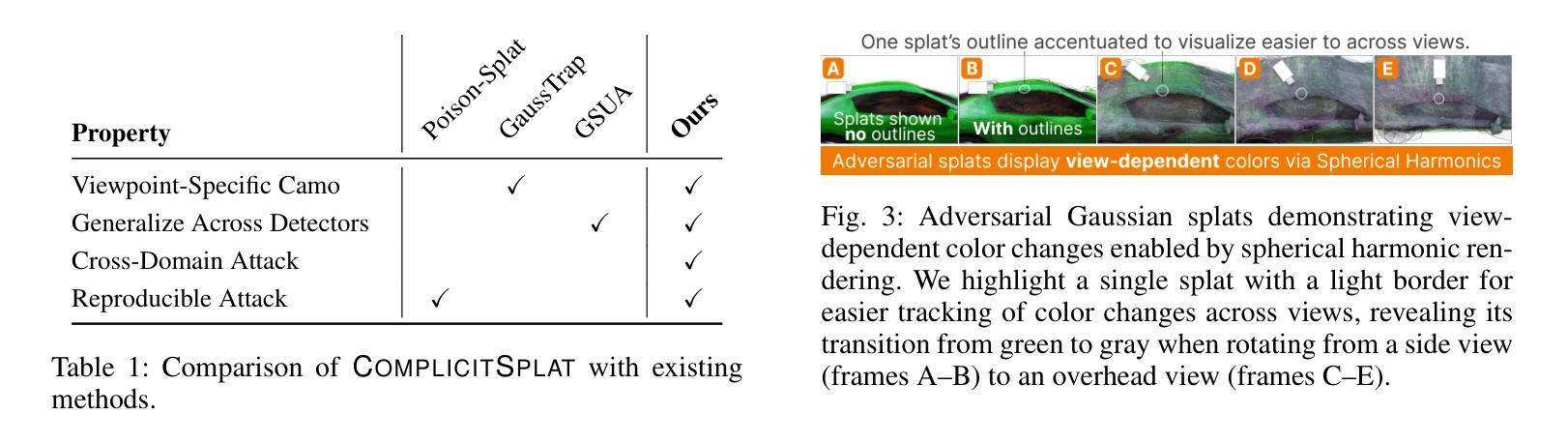
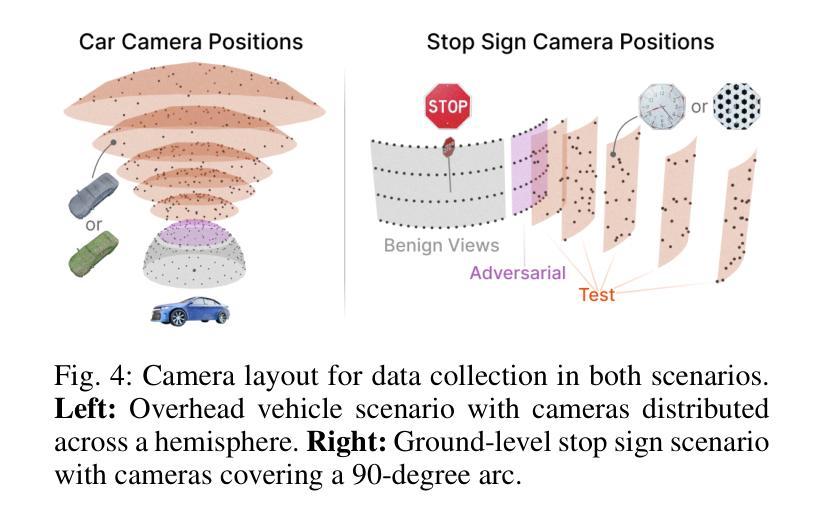
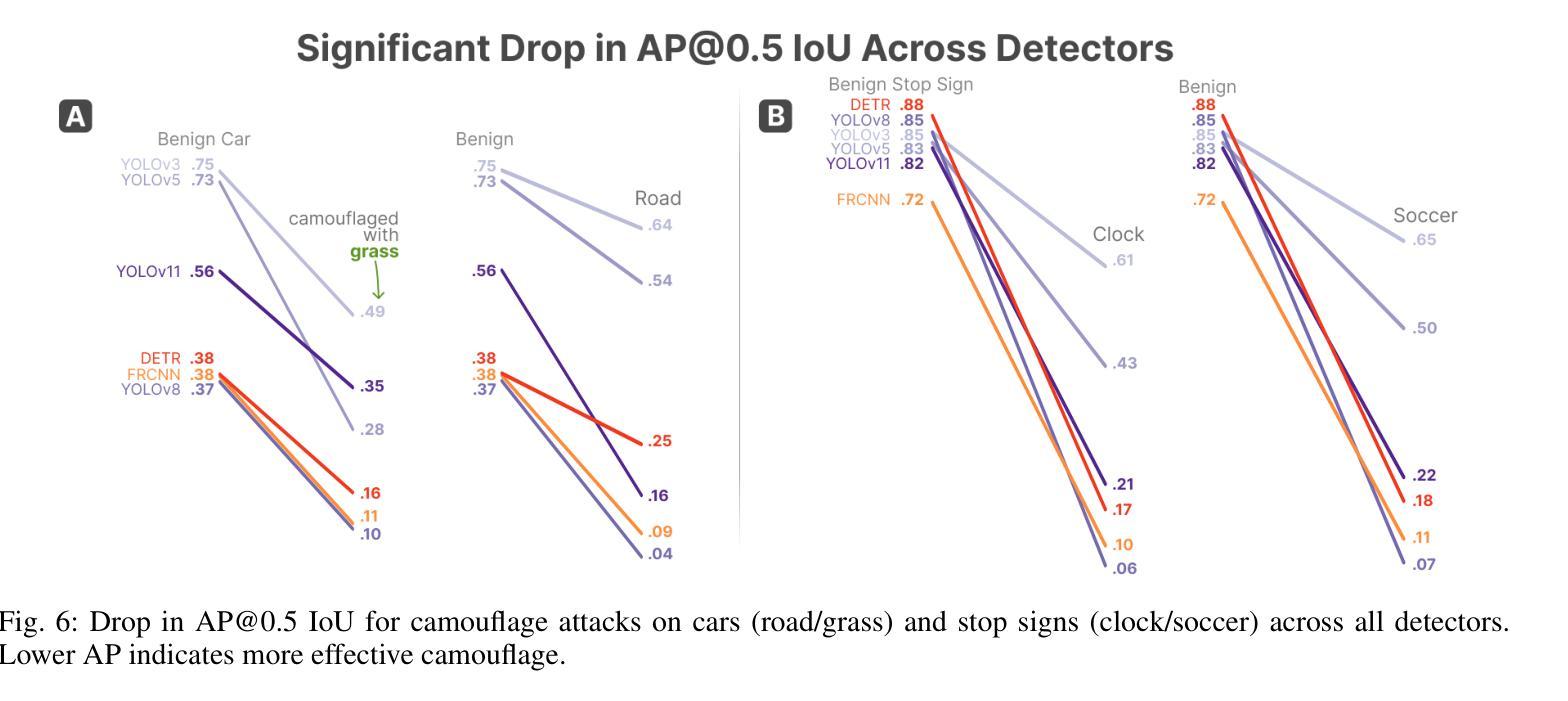
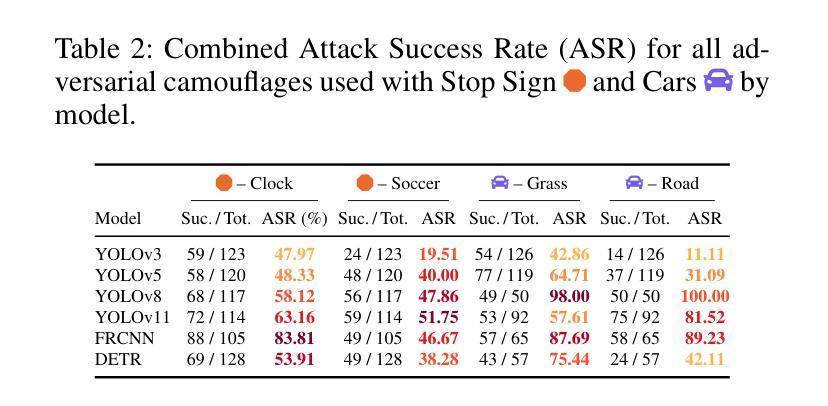
As 3D Gaussian Splatting (3DGS) gains rapid adoption in safety-critical tasks for efficient novel-view synthesis from static images, how might an adversary tamper images to cause harm? We introduce ComplicitSplat, the first attack that exploits standard 3DGS shading methods to create viewpoint-specific camouflage - colors and textures that change with viewing angle - to embed adversarial content in scene objects that are visible only from specific viewpoints and without requiring access to model architecture or weights. Our extensive experiments show that ComplicitSplat generalizes to successfully attack a variety of popular detector - both single-stage, multi-stage, and transformer-based models on both real-world capture of physical objects and synthetic scenes. To our knowledge, this is the first black-box attack on downstream object detectors using 3DGS, exposing a novel safety risk for applications like autonomous navigation and other mission-critical robotic systems.
随着3D高斯拼贴(3DGS)在关键安全任务中快速采用,用于从静态图像高效合成新型视角,对手如何篡改图像以造成危害?我们引入了ComplicitSplat,这是一种首次利用标准3DGS着色方法的攻击,以创建视角特定的伪装——颜色和纹理随着观察角度而变化——将对抗性内容嵌入场景对象,这些对象仅在某些特定视角下可见,并且无需访问模型架构或权重。我们的广泛实验表明,ComplicitSplat能够成功攻击各种流行的检测器——无论是单阶段、多阶段还是基于转换器的模型,无论是在现实世界中对物理对象的捕获还是在合成场景中。据我们所知,这是使用3DGS下游对象检测器的首次黑箱攻击,暴露了自主导航和其他关键任务机器人系统应用的新安全威胁。
论文及项目相关链接
PDF 7 pages, 6 figures
Summary
本文主要介绍了针对采用3D高斯投影技术渲染物体在视角感知的脆弱性进行的攻击方法,并提出一种利用ComplicitSplat攻击方法,通过改变物体颜色和纹理来嵌入对抗内容,使得攻击内容仅在某些特定视角下可见。这种攻击方式无需获取模型架构或权重信息,并能对多种类型的检测器进行攻击,包括单阶段、多阶段和基于Transformer的模型。此攻击揭示了新型安全威胁,可能对自动驾驶导航等关键任务系统造成潜在风险。
Key Takeaways
- ComplicitSplat是一种利用3DGS渲染技术的攻击方法,能够在特定视角下创建伪装物体。
- 该攻击方式在不接触模型架构或权重信息的情况下,嵌入对抗内容。
- ComplicitSplat攻击能成功影响多种类型的检测器,包括单阶段、多阶段和基于Transformer的模型。
- 这种攻击方式对现实世界物理对象的捕捉和合成场景都有效。
- 这是首个针对下游对象检测器的黑盒攻击方法,利用3DGS技术揭示新型安全威胁。
点此查看论文截图